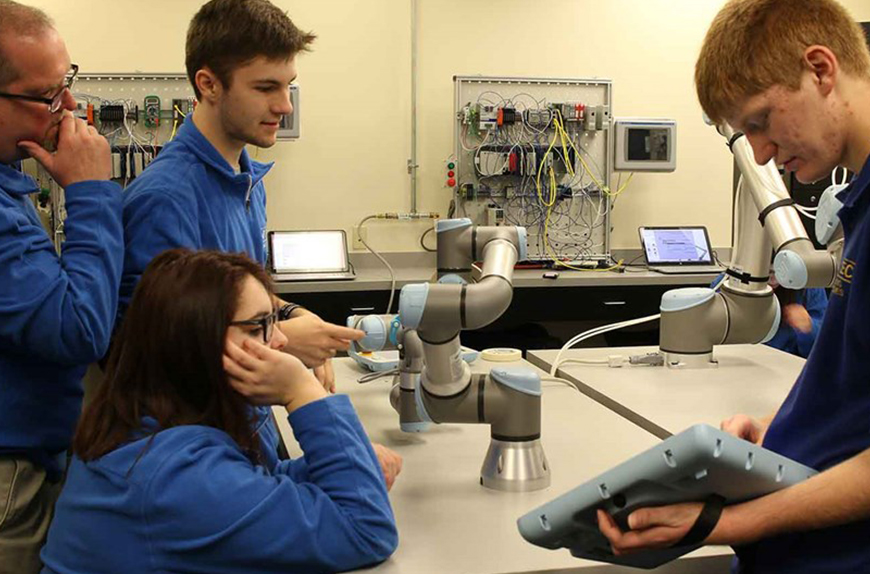
优傲机器人应用于整个教育、科学和研究界,为准确收集和分析信息、开发新技术和教育后代奠定基础。在经过风险评估后,直观、易于编程的协作式机器人对学员来说,操作十分安全,可用于职业和技术项目,向青少年和成年人传授有价值的和新的自动化技能,以帮助弥补制造技能之间的差距。协作式机器人还可用于支持一系列研究领域的复杂高等教育项目。小型、轻量化的协作式机器人部署起来经济高效,可以安装在小型实验室内和教室课桌上。协作式机器人在严格的实验室环境和需要避免人员造成污染的分析流程中表现出色。
获取更多信息:15814107663 立即咨询>>
立即咨询>>
| 序号 | 型号 | 数量 | 厂商 | 选项 |
| 1 | UR3(可以是其他型号) | 1 | 优傲机器人 | 必选 |
| 2 | Robotiq 视觉相机 | 1 | Robotiq | 必选 |
| 3 | Robotiq ft300s力控传感器 | 1 | Robotiq | 必选 |
| 4 | Robotiq 2f-85夹爪 | 1 | Robotiq | 必选 |
| 5 | 机器人架台 | 1 | 非标定制 | 选配 |

Links:: 优傲机器人官网
Copyright © 东莞市库崎智能科技 版权所有 粤ICP备:17066985号 技术支持:麦田网络