UR双臂机器人的两个手臂,既可以单独运行,也可以协同工作。从技术特点来说,优傲双臂机器人是由UR3/UR3e、UR5/UR5e、UR10/UR10e、UR16e任意两款或者同一款的两台机械臂组成,用户可以根据实际生产需要选择不同的机械臂进行搭配。同时,双臂协作应用支持任意角度安装,可以满足不同空间和负载的需求,具有非常高的灵活性;结合URCap 双臂插件和标定软件即可实现双臂共享坐标系,协同操作。一个工作站让用户有了多种选择,提高了设备利用率,可以最大程度实现柔性生产。
获取更多信息:15814107663 立即咨询>>
立即咨询>>
本方案资源扩展性强,可根据不同需求进行合理搭配,详细信息可咨询我公司销售或技术人员。
| 序号 | 品牌 | 型号 | 数量 | 备注 |
| 1 | 优傲机器人 | UR5机器人 | 2 | 机器人系统版本号要求Version 3.2.x.x及后续版本 |
| 2 | 工业级交换机或者路由器 | 至少3个网口 | 1 | IP防护等级根据具体的应用需求定 |
| 3 | Cat7类屏蔽网线 | 3 | ||
| 4 | 24V信号线 | 5 | ||
| 5 | 法兰链接件 | 机加工 | 1 | 固定两台机器人的法兰(标定用),无需标定则不需要 |
2、机械安装
两台机器人的机械安装分别按照单台UR机器人的安装标准进行,相关部分请参考对应UR机器人的安装指南。
3、Emergency信号线连接与配置
双臂机器人作为一个整体,紧急停止(急停)信号需要共享,即触发任意一个急停信号,另外一台机器人有需停止。若应用中只有双臂UR机器人则只需进行如下a,c,d步,若还有外围设备(如安全PLC)或者急停按钮需要连接,则进行如下第a-d步。
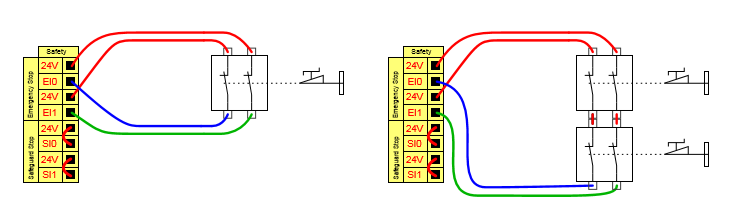
a)两台UR机器人急停信号线连接,图2。
b)与外围设备或外部急停按钮的连接,图3。
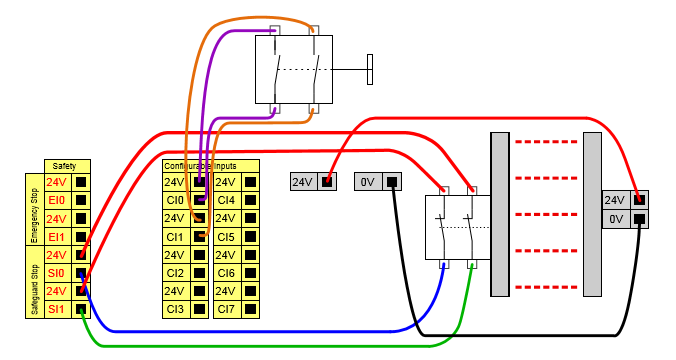
c)在一些应用中需要使用Safeguard stop,与急停不同,UR机器人不提供Safeguard stop的数字输出信号,因此需要采用多联开关(两台UR机器人需4联开关)同时连接两台UR机器人,图5为单台UR机器人的Safeguard stop 连接图。
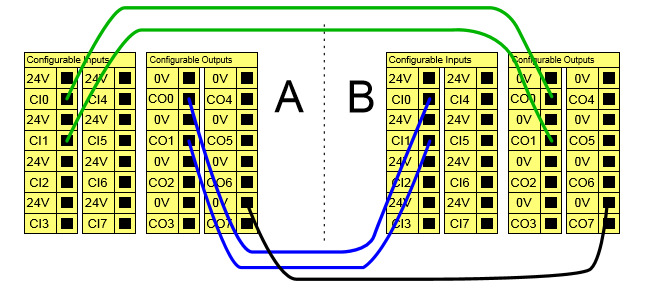
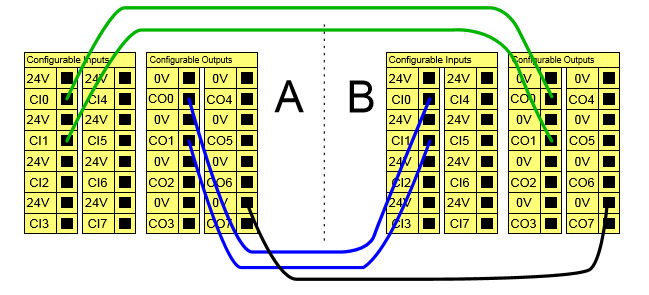
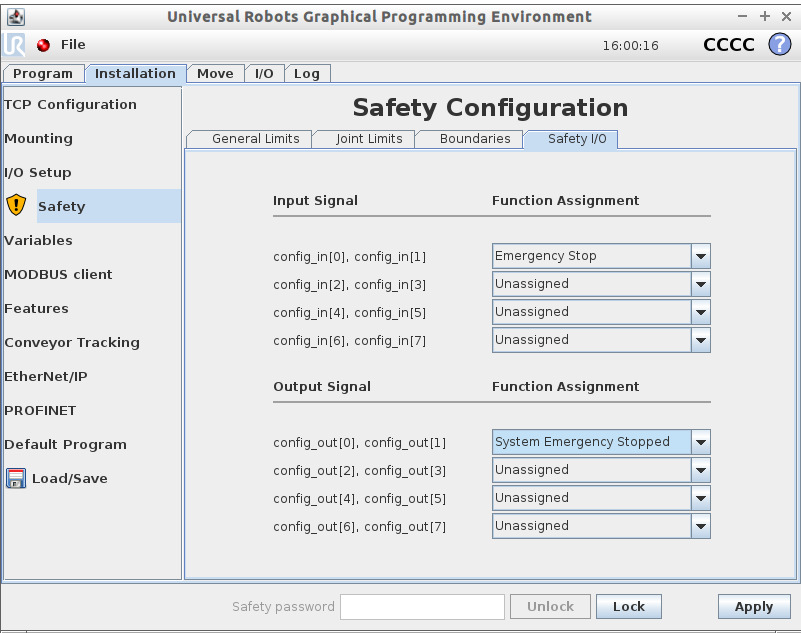
d)急停信号连接好后需要在示教器上安装设置中对Configurable IO进行配置,图6。
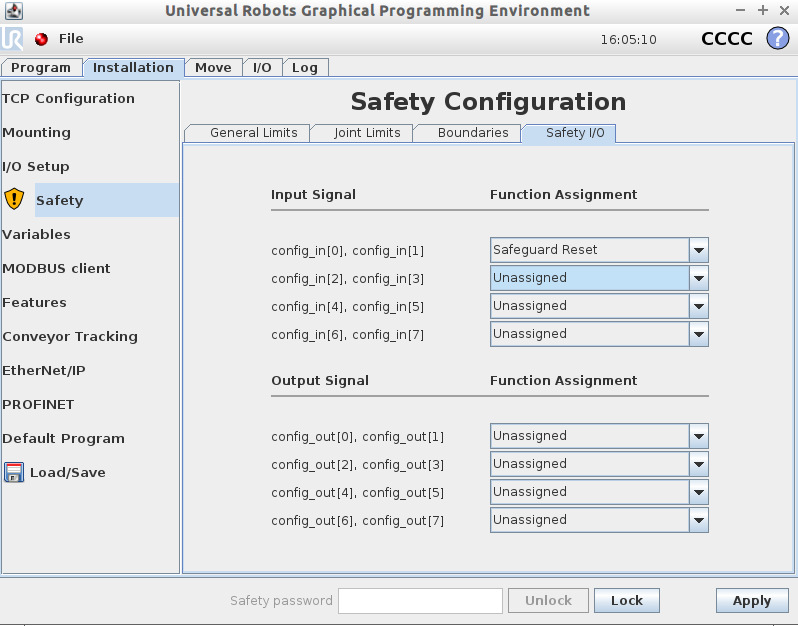
如进行了Safeguard stop的连接,那么复位的操作可以通过配置Configurable IO为Safeguard reset 完成,图7。
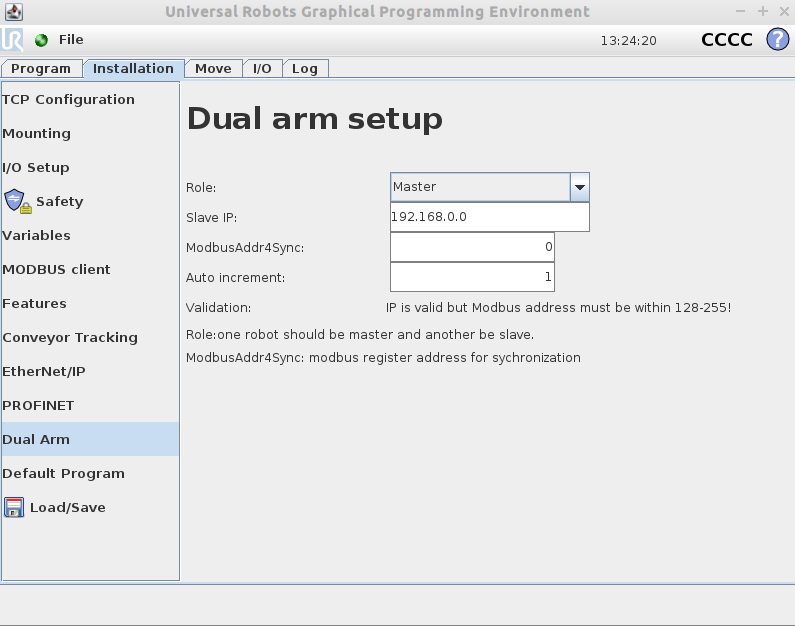
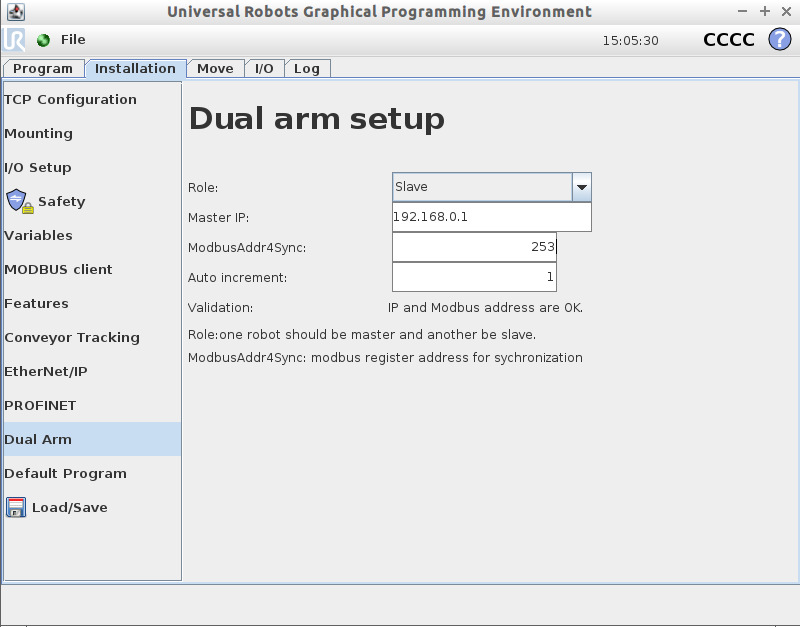
4、网络连接与配置
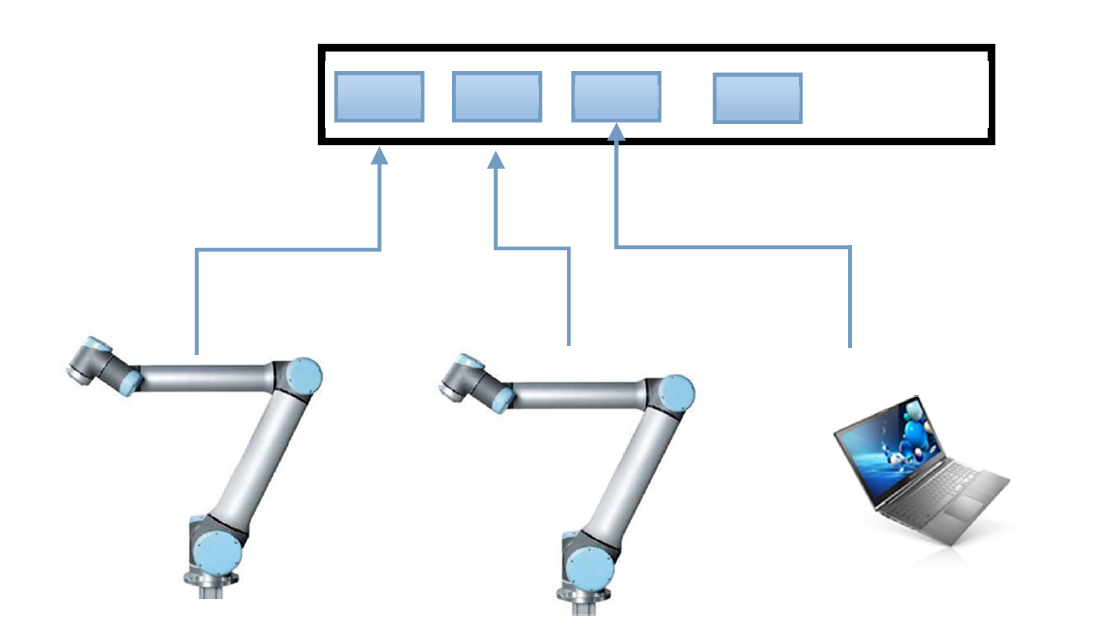
两台UR5机器人协同通讯通过Modbus-TCP通讯实现,因此需要将两台控制器通过网络信号线链接起来。考虑到调试方便或者与外围设备的通讯需求,交换机或路由器至少有三个网口,两台UR5机器人设置在同一个网段,连接图如图8。
5、双臂标定
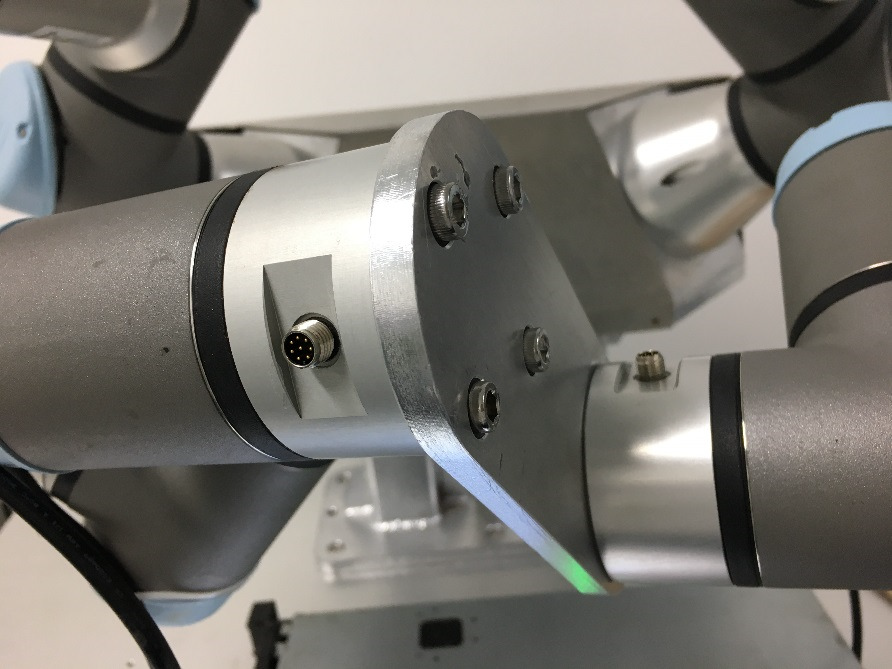
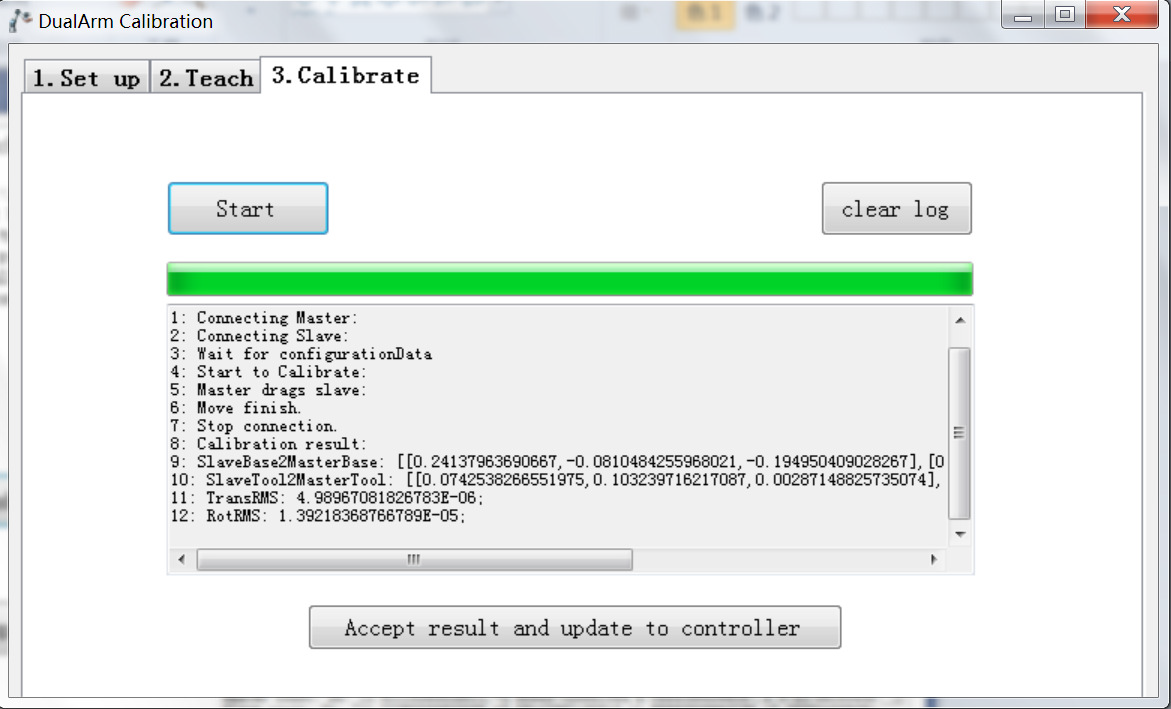
双臂标定流程是连接两台UR机器人的法兰,通过一台拖动另外一台机器人到不同姿态,解算出从机器人基坐标在主机器人基座标下的位姿以及从机器人TCP坐标系在主机器人TCP坐标系下的位姿。两台机器人法兰的连接不限定具体的形式,但是需尽量保证其相互作用力的力臂较短(虽然标定软件会自动让负载更大的机器人拖动负载小的,但是力臂太长可能还是无法拖动),法兰之间连接稳固即可(图9为一种参考设计)。
1)使用法兰连接固定两个法兰;
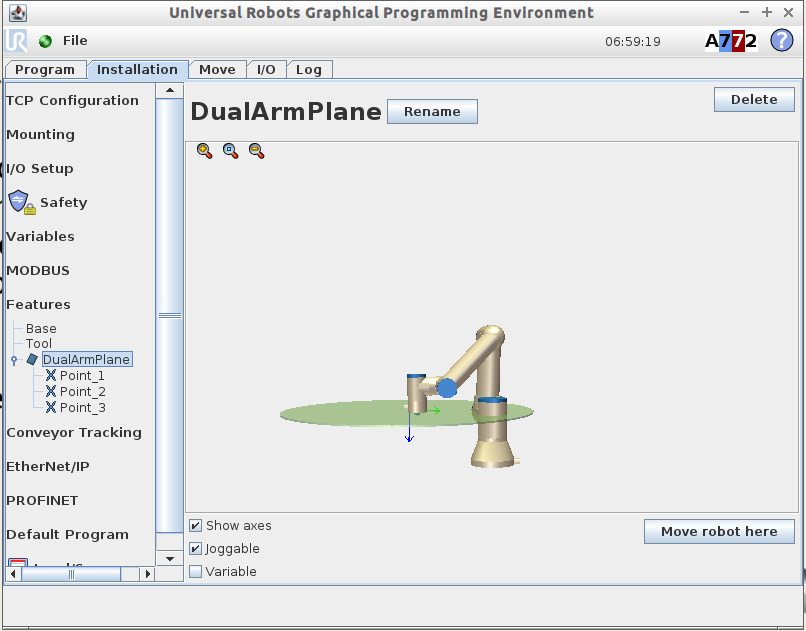
2)利用一台机器人平面特征(共享坐标系);首先定义针尖TCP,然后通过针尖TCP,定义平面特征,如图10。
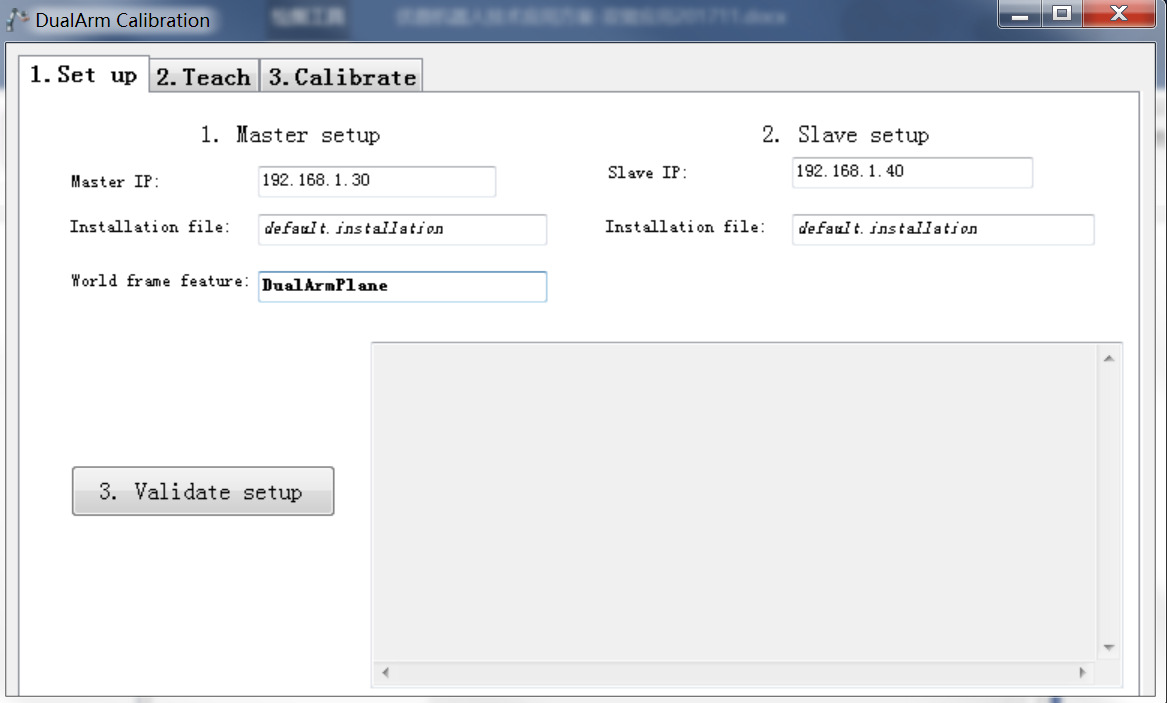
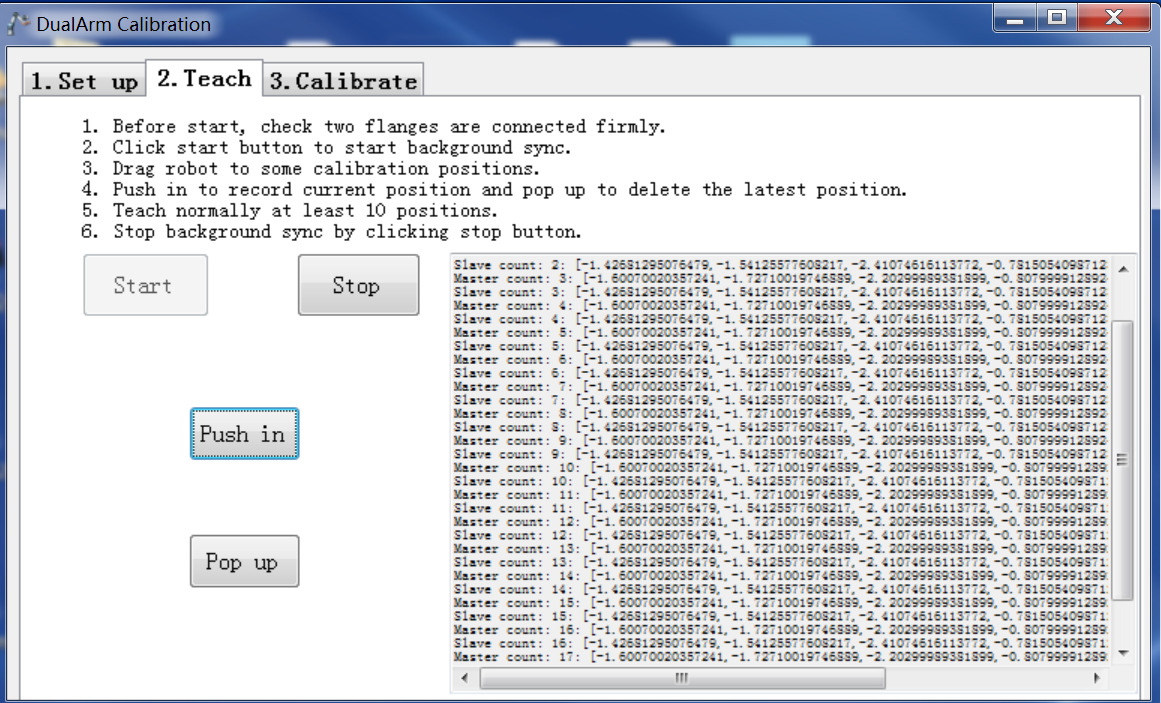
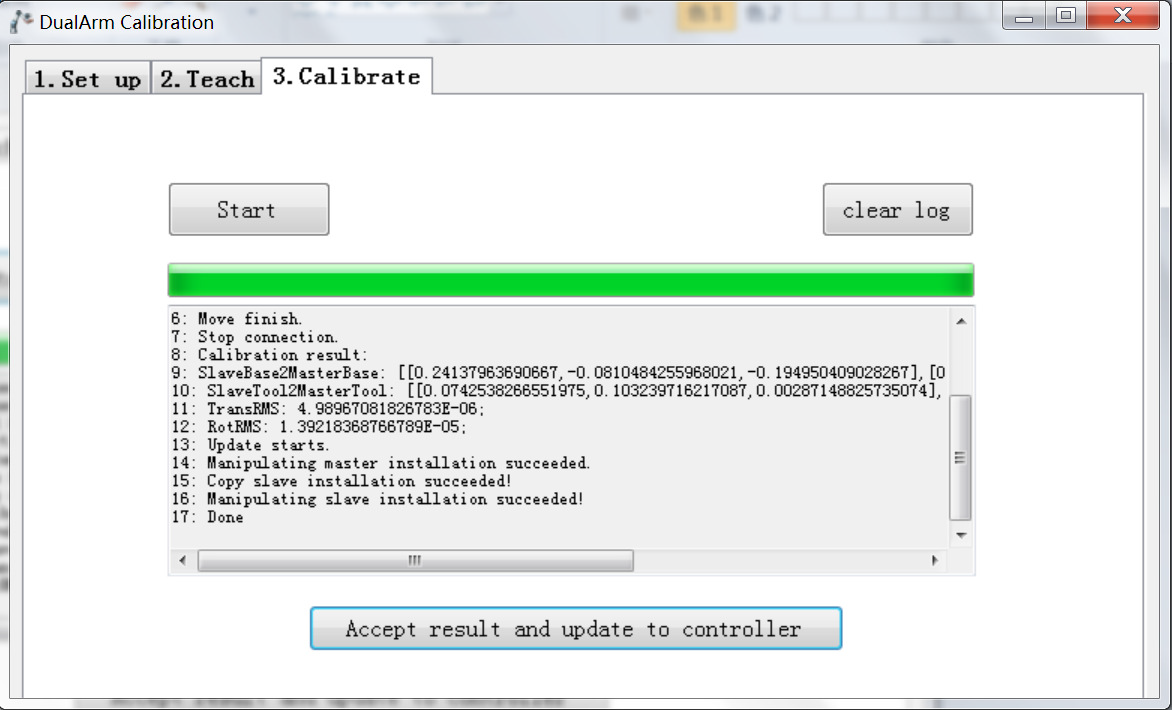
3)启动 DualArmCalibration.exe程序,其中Master就是步骤2中定义共享坐标系的主机器人,其安装设置文件是包含有这个坐标系的文件;Slave的安装设置文件则是从机器人标定结束后以此为基础添加 DualArm_Plane平面特征的文件;设置完成之后,点击Validate setup 按钮,如果显示成功,那么即可进入第二个选项页 Tecah。
 |  |
| (1) | (2) |
 |  |
| (3) | (4) |

Links:: 优傲机器人官网
Copyright © 东莞市库崎智能科技 版权所有 粤ICP备:17066985号 技术支持:麦田网络