技术参数
| MiR Charge 48V自动充电桩 | |
| 用途 | 机器人可前往充电站完成充电 |
| 长*宽*高 | 622*287*487mm |
| 重量 | 20 kg/440 lbs |
| 环境温度范围 | 5°C 至 40°C |
| 湿度 | 10-95%,无冷凝 |
| 功率 | 输出: 48 V,最大 40 A 输入: 100/240 V AC,50-60 Hz |
| 标准 | EN60335-1-12、EN60335-2-29:2004、EN61000-6-1:2007 和 EN61000-6-4:2007,经 TUV 安全认证 |
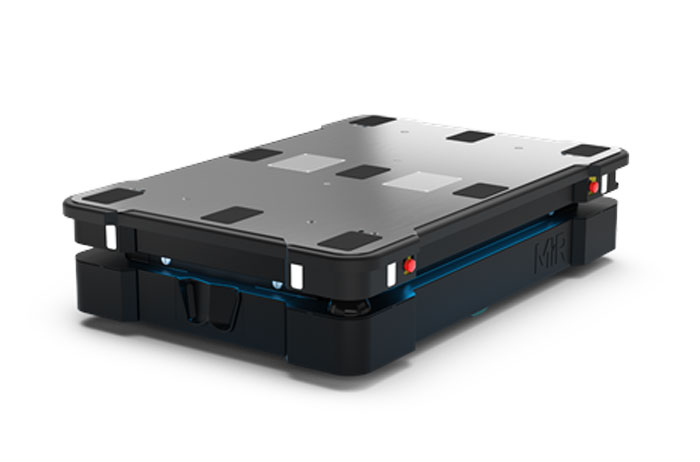
MiR1350 的有效负载为1350kg,是迄今为止 MiR 推出的功能最强大的 AMR,可以最大限度地提高物流运营效率。借助 MiR1350,您可以高效地自动搬运极重货物和托盘。MiR1350 是市场上首款获得 IP52 评级的 AMR。这意味着它具有受保护的增强组件,能够防尘防水。MiR1350 适用于更多的环境,可以靠近敞开的门或其他暴露于水滴和灰尘的地方行驶。MiR1350 按照当前最高安全标准 ISO3691-4 打造,显著优于市场上的其他 AMR。MiR1350 可在智能手机、平板电脑或电脑上通过直观的 MiR 机器人界面进行操作,可根据以往的经验进行编程。
获取更多信息:15814107663
| 协作移动机器人 | 为工业及物流应用打造的重型负载及托盘内部运输解决方案 |
| 长*宽*高 | 1350*920*322mm |
| 离地间隙 | 30 mm/1.2 in |
| 重量(无负载) | 233 kg/513 lbs |
| 颜色 | RAL 9005/乌黑色 |
| 机器人有效负载 | 1350 kg/2976 lbs |
| 电池运行时间 | 6.75小时(满载)- 9.80小时(空载) |
| 最大速度 | 1.2 m/s (43km/h) |
| 定位精度 | 位置(机器人中心):+/-3 mm/0.2”。 角度:+/- 1° |
| 可越过的间隙和底框梁宽度 | 29 mm / 1.1 in |
| 电池 | Li-NMC 48 V 34.2 Ah |
| 充电时间 | 最高 1:12(例如充电 30 min = 运行 5.45 小时) |
| 充电周期时间 | 3000 |
| 机器人通讯 | WiFi:双频无线 AC/G/N/B I/O:4 个数字输入端口,4 个数字输出端口,1 个支持 Modbus 协议的以太网端口 |
| 算法控制 | 基于ROS开发、Rest API,Modbus TCP |
| SICK microScan3 安全系统 | SICK NanoScan3 安全系统(2 个)在机器人周围提供 360°视觉保护 |
| 3D 相机(2 个) | Intel RealSense D435。视场:可在机器人前方 1200 mm 处检测到高度为1800 mm 的 物体。114°总水平视图。地面视图,与机器人的最小距离:250 mm |
| 接近传感器 | 8个 |
| 环境温度范围 | 5°C 至 40°C(湿度 10-85%,无冷凝) |
| IP 等级 | IP 52 |
| 合规和批准 | 13 类安全功能,符合 ISO 13849-1 标准:ISO 3691-4,EN1525,ANSI B56.5 EMC:EN12895,EN61000-6-2,EN61000-6-4。ANSI R 15.08 |
| MiR Charge 48V自动充电桩 | |
| 用途 | 机器人可前往充电站完成充电 |
| 长*宽*高 | 622*287*487mm |
| 重量 | 20 kg/440 lbs |
| 环境温度范围 | 5°C 至 40°C |
| 湿度 | 10-95%,无冷凝 |
| 功率 | 输出: 48 V,最大 40 A 输入: 100/240 V AC,50-60 Hz |
| 标准 | EN60335-1-12、EN60335-2-29:2004、EN61000-6-1:2007 和 EN61000-6-4:2007,经 TUV 安全认证 |


| 集中控制机器人车队 | 最高 100台移动机器人 |
| 任务处理 | 在多个机器人中优先化处理任务 |
| 电池电量管控 | 检查机器人电池电量并自动充电 |
| 交通流量控制 | 使用流量控制算法避免多重路径交叉点产生交通拥堵 |
| 提供两种解决方案 | MiR Fleet PC:包含物理 PC 硬件 MiR Fleet Server:安装在现有服务器基础设施中 |
| 型号 | NUC7i3DNB |
| PC | Intel® Maple Canyon NUC |
| CPU | Intel® Core™ i3-7100U 处理器(3M 缓存,2.40 GHz) |
| RAM | 8GB DDR4-2400 |
| SSD | 128GB 2.5" |
| 操作系统 | Linux Ubuntu 16.04 |
| 网络功能 | 1 Gbit 以太网,没有无线选项 |
| 所需连接 | 110V 或 230V 电源插座和以太网络线缆 |
| 安装要求 | 通常必须在与机器人相同的物理网络上运行 |
| 安装文件大小 | 3GB |
| MiR Fleet 更新文件大小 | 约 300 MB |
| 服务器要求 | 最低频率为 2.1 GHz 的双核处理器 |
| RAM | 最小 8 GB |
| HDD | 80 GB |
| 支持的操作系统 | Ubuntu 18.04 LTS,Ubuntu Server 18.04 LTS,Debian 9, CentOS 7,Redhat Enterprise Linux 7.4 |
MiR1350 是一款适用于各种生产设施、仓库和其他工业场所的自主式移动机器人,能够运输重达1350kg的货物和托盘。
用户将利用基于网络的用户界面来控制MiR1350(该用户界面可通过PC、智能手机或平板电脑上的浏览器进行访问)。每台MiR机器人都有其自己的网络。请参阅连接机器人界面。MiR机器人可通过设置运行固定路线、按需调用或执行更为复杂的操作(任务)。MiR机器人通过可在首次使用机器人时创建或导入的地图定位并导航。内部地图包含确定的用于物流规划的位置(办公室、成品运输和生产车间等)。运行时,安全激光扫描仪确保机器人避开未绘制在地图上的动态障碍物(人员、设备)。
借助MiRCharge 48V充电桩,机器人可自动前往充电。只需定义充电任务和地图中的充电位置即可实现。
 |  |
 |  |
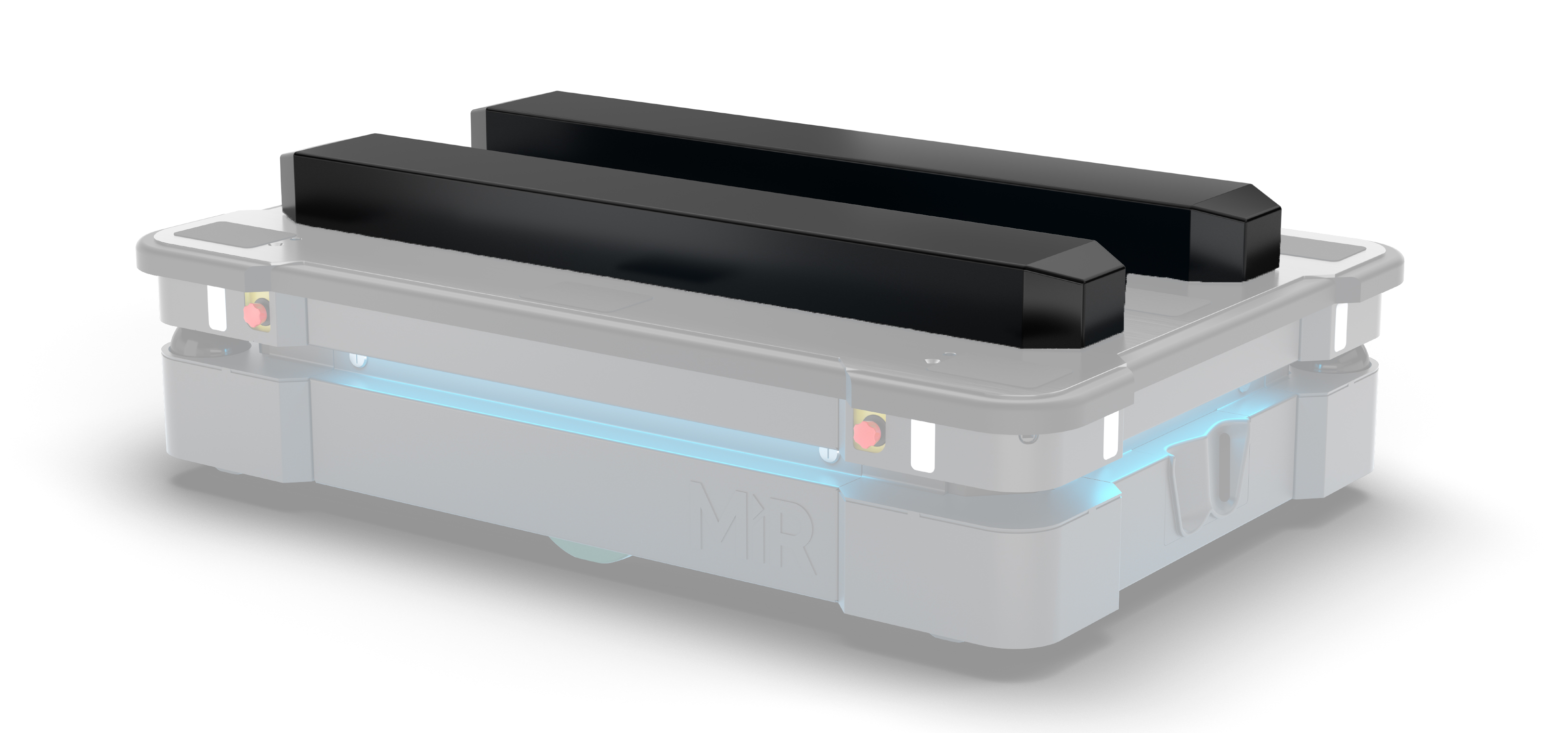
借助 MiR 专门设计的托盘升降机,MiR1350 能够自动拾取、运输和交付托盘。因此,这款协作机器人可以安全地替代许多公司都希望在生产车间弃用的传统托盘升降机和搬运车,因为它们经常带来安全风险。同时,与较为传统的托盘升降机相比,MiR1350 不需要任何操作人员,因而优化了托盘运输,并使员工有时间完成更有成效的工作。
MiR1350 的主要特性包括:


库崎智能致力于企业数字化精益制造集成式解决方案,提供了一个专用于优傲机器人设计、订购和组装工业设备的平台,我们的工程师团队可以为您的应用构建和选择正确的设备。
Links:: 优傲机器人官网
Copyright © 东莞市库崎智能科技 版权所有 粤ICP备:17066985号 技术支持:麦田网络