当前位置:主页 > 产品中心 > Robotiq末端执行器 >
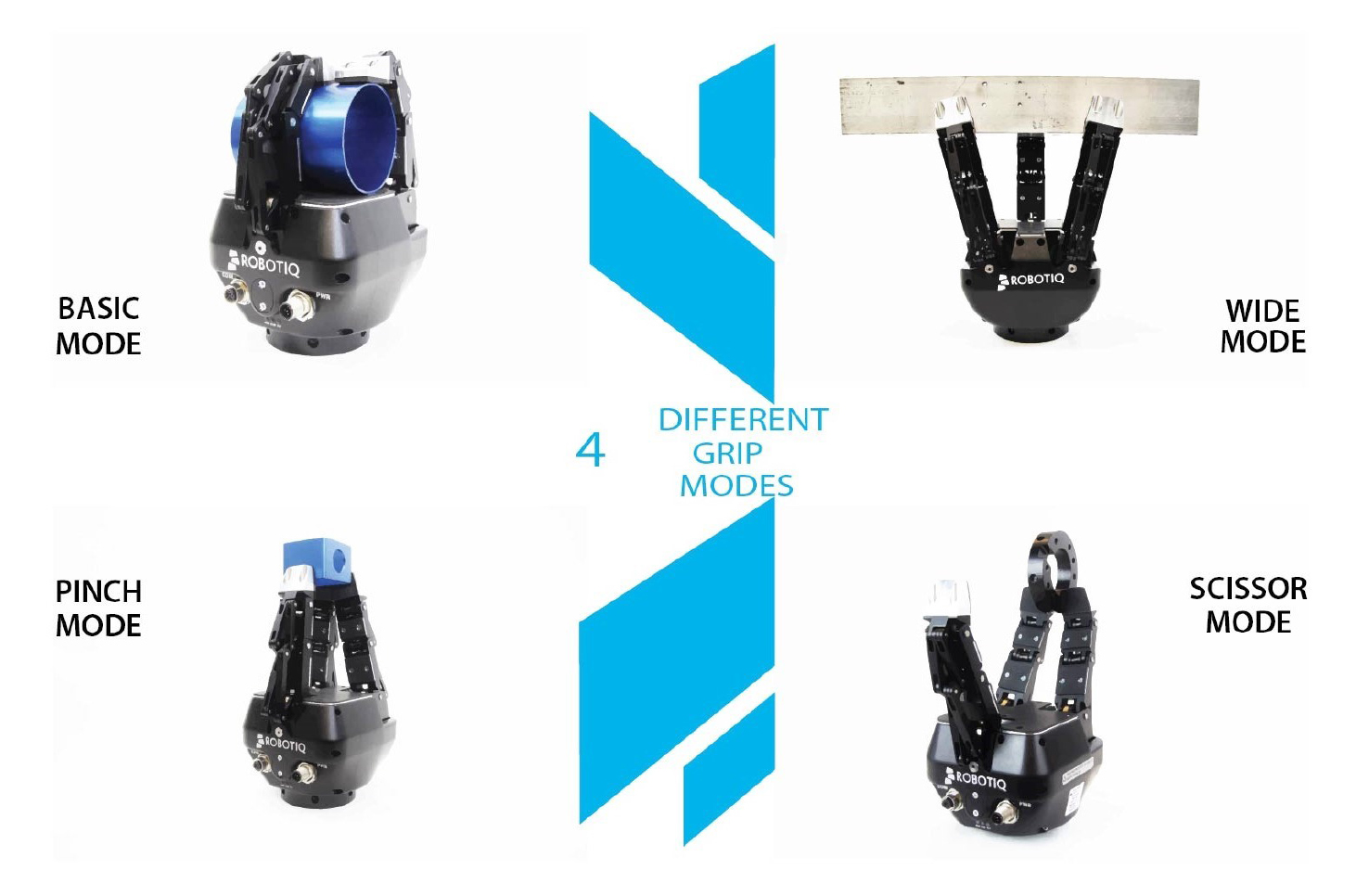
Robotiq 三指自适应机器人夹持器追求功能及柔性化,是制造和机器人研究的理想选择,不但为协作机器人提供 Plug + Play 整合包,且支持 ROS 程序包,操作简单即插即用,同时完全兼容多数主流工业机器人和协作机器人。 1、轻松对每个手指位置、速度和力度进行编程。 2、4种不同的抓握模式,可抓握各种形状和尺寸的零件。 3、极宽的冲程,可打开至 155 毫米。 4、内置位置反馈机制,能检测到零件是否被拾取。 5、可以兼容主流工业机器人和协作机器人。
获取更多信息:15814107663






| 规格 | 三指自适应机器人机械爪 |
| 行程(可调整) | 155 mm |
| 夹力(可调整) | 30 至 70 N |
| 适形抓握载荷 | 10 kg |
| 摩擦抓握载荷 | 2.5 kg |
| 手指位置重复(指尖抓握) | 0.05mm |
| 闭合速度(可编程) | 22 至 110 mm/s |
| 夹具质量 | 2.3 kg |
| 主要通信协议 | Modbus RTU (RS-485) |
| 次要通信协议选项 | Modbus TCPEtherNet/IPPROFINETEtherCATDeviceNet CANopen |




库崎智能致力于企业数字化精益制造集成式解决方案,提供了一个专用于优傲机器人设计、订购和组装工业设备的平台,我们的工程师团队可以为您的应用构建和选择正确的设备。
copyright (©) 2021 东莞市库崎智能科技有限公司 粤ICP备:17066985号 技术支持:麦田网络