
Robotiq夹爪抓取功能概述
Robotiq 2f-85/140夹爪有一个驱动器用于打开和关闭手指。手指将采用平行夹取或包围或内撑夹取;Robotiq夹爪 抓取方案取决于零件的几何形状、零件相对于夹爪的相对位置。换句话说,拾取同一零件可能会有不同的抓取方式;要注意的是,只有当手指首先以远端指骨的上部接触到物体时才能进行平行抓握。 相反,对于包围抓握,手指必须首先以远端指骨的近端或下部接触物体。 另外,为确保稳定性,在进行包围抓握时,应将物体靠在夹爪手掌的支撑面上。(还是要支撑面的,保证稳定、可靠性)

Robotiq夹爪位置、速度、力控制,功能概述:
- 位置设置:指尖运动位置。
- 速度设置:开、合过程中的速度大小。
- 力设置:定义了夹具的最终夹持力。 该力将限定夹取运动过程中发送到电动机的最大电流(限定堵转电流)。 如果超过当前限制,手指会停止并触发对象检测通知。
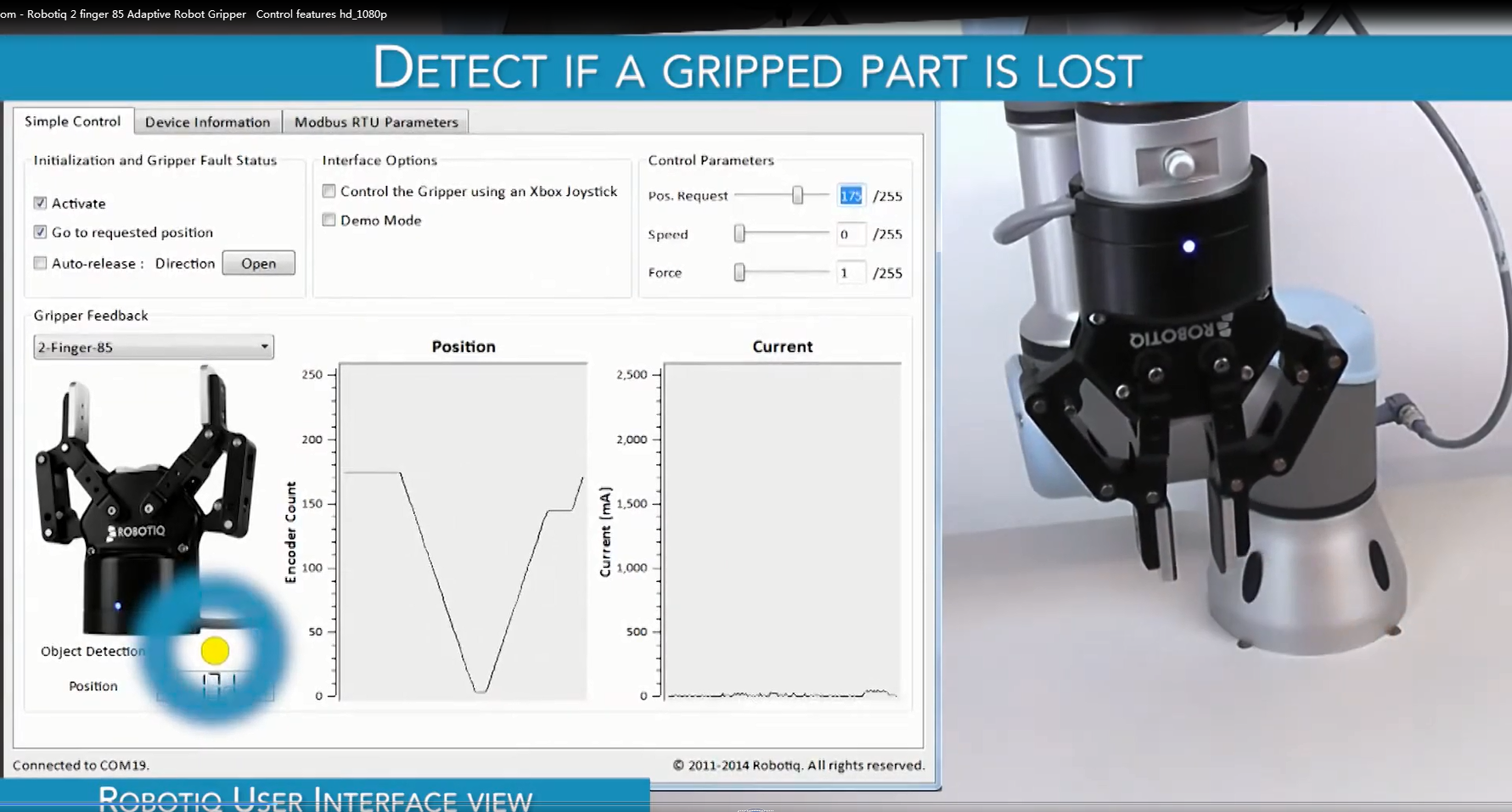
Robotiq夹爪对象检测功能的实现(是否抓取成功)
- 通过检查电机驱动电流的大小实现。(控制器内部有pid控制,一旦堵转,由于积分i的作用,驱动电流会越来越大,超过I的最大限制时,则认为已经抓取到物体)。
- 此功能还适用于丢失或掉落的物体,如果在检测到物体掉落后,则会向用户发出警报。
- 对象检测的精确度只有几毫米。在某些情况下,对象检测可能不会检测到一个对象,即使它已经被抓住。例如,在不发生物体检测的情况下,用指尖夹起一个薄薄的物体可能是成功的。由于这些原因,使用此特性时要谨慎。
Robotiq夹爪自动标定功能:
- Robotiq自适应夹爪自动校准将允许夹爪调整到任何指尖。
- 无论所用指尖的大小和形状如何,始终在0开始打开,在255完全闭合,并且准线性关系在0和255之间。
- 设定自动标定程序,用于切换手指后,自动辨识手指宽度。
库崎智能科技为Robotiq夹爪和UR机器人铂金代理商,为客户提供完善的售后与保修服务。即插即用方案让客户快速部署,库崎智能专注于可定制化服务与解决方案。在线客服免费热线:15814107663(微信同步)
只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

