
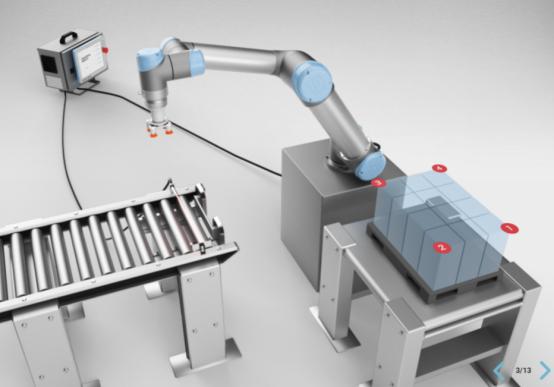
1.单击托盘
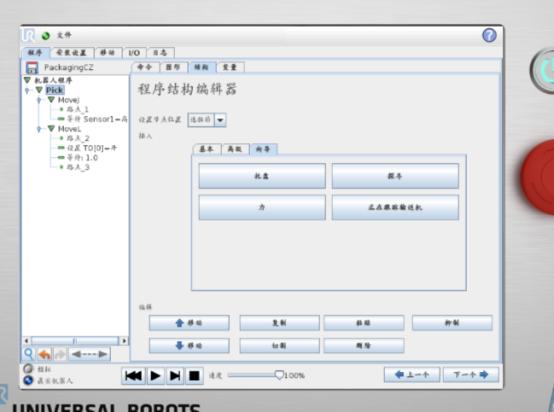
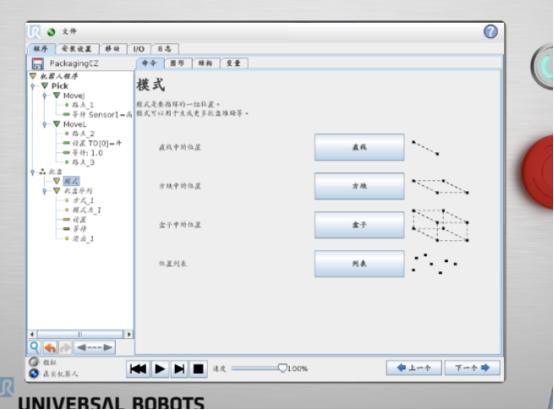
2.单击命令,单击方块模式
3.数出方块的行数和列数,数出并输入到示教器中,单击a1st_corner_1,指定位置,单击确定,保存第一个角落位置。

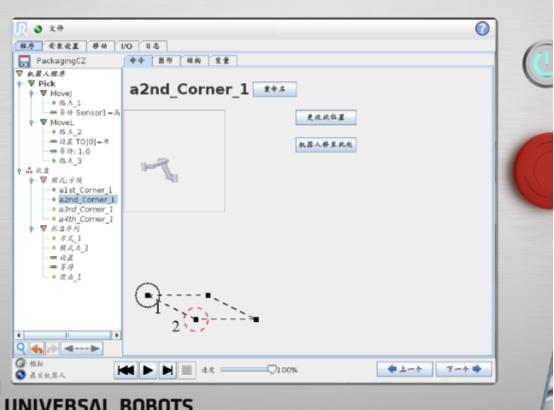
4.单击a2nd——corner1,指定位置,单击确定,保存第二个角落位置。
5.单击a3rd——Corner1,指定位置,单击确定,保存第三个角落位置。
6.单击a4rd——conrner1,指定位置,单击确定,保存第四个角落位置,UR机器人清楚了托盘的尺寸和数量。
7.单击图形选项卡,不同的模式放置方式,退出位置,向下,向侧面,或者斜对角方向。
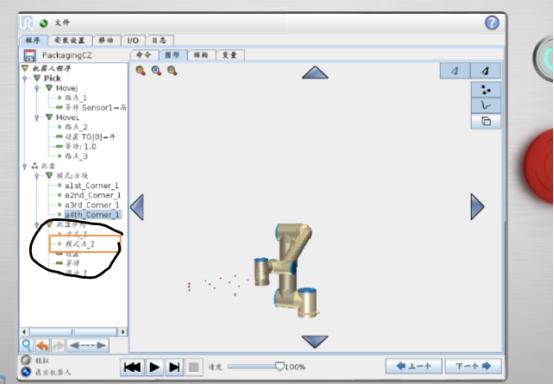
8.单击命令选项卡和程序树中的方式1,单击设置此路点。
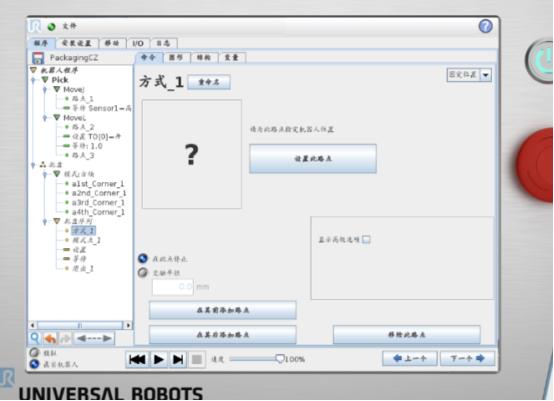
9.单击模式点1,设置此路点,将工具中心点拖到下一点,单击确定。
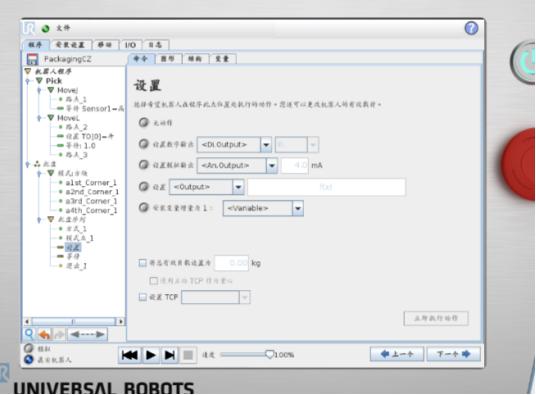
10.单击模式点1下发的设置,选择数字输出,第一个下拉菜单,第二个下拉菜单中低,为工具释放工件。其有效载荷发生变化,单击有效载荷复选框,选择输入新的有效载荷。
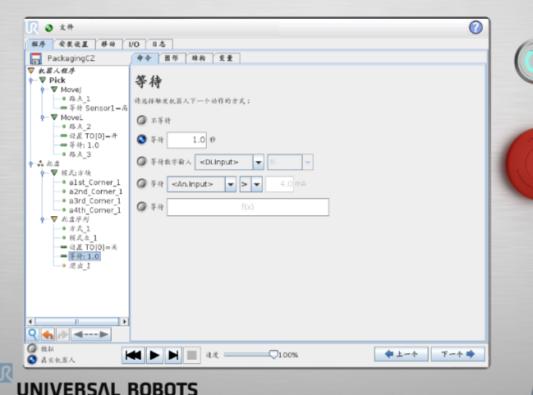
11.释放工件需要等待,单击程序树中等待命令,选择等待1s。
12.单击退出,单击设置此路点,将机器人拖动到该退出点,单击确定,保存该退出点。
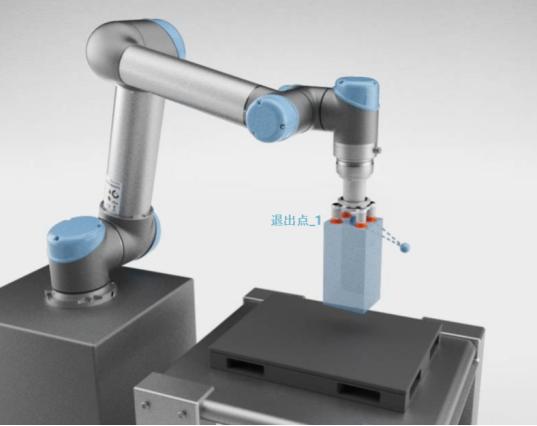
将托盘满时,该程序将继续循环程序,在空托盘替代装满的托盘,需要暂停。
将托盘满时,该程序将继续循环程序,在空托盘替代装满的托盘,需要暂停。
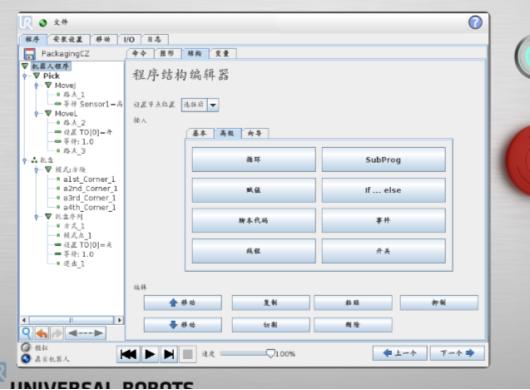
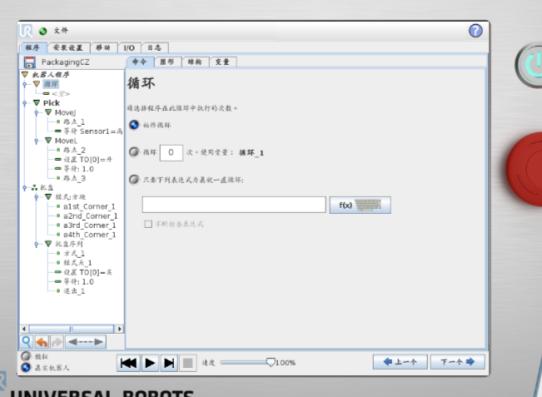
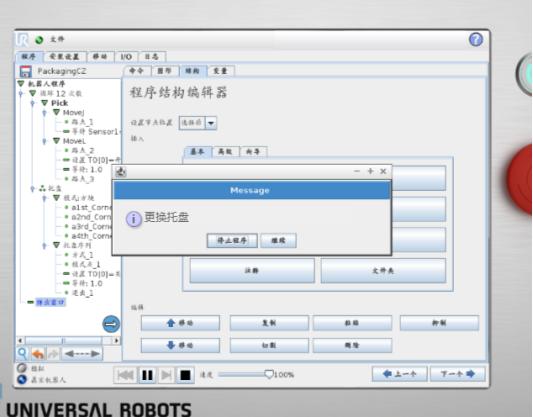
13.单击机器人程序,单击结构选项卡,高级选项卡,单击循环按钮,循环命令被插入到程序树中。单击命令选项卡,选择循环次数12,与工件数量相等。
14.单击结构命令,单击程序树pack目录,单击切割按钮,单击循环命令中空白字段,单击粘贴按钮插入代码。
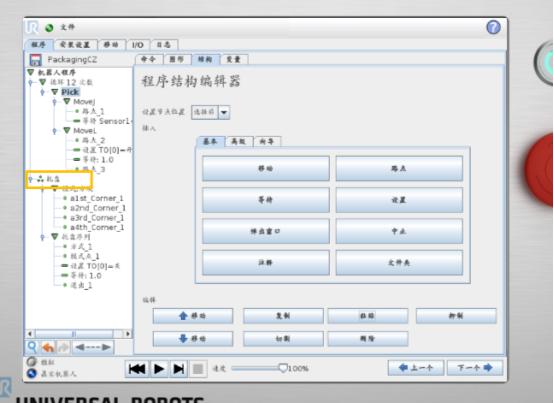
15.单击托盘结构,单击切割,单击pack目录,单击粘贴,循环中的代码循环12此。

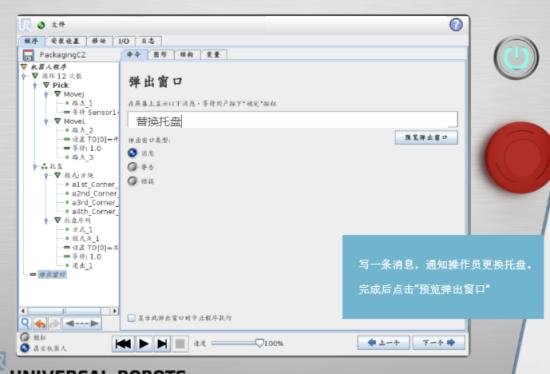
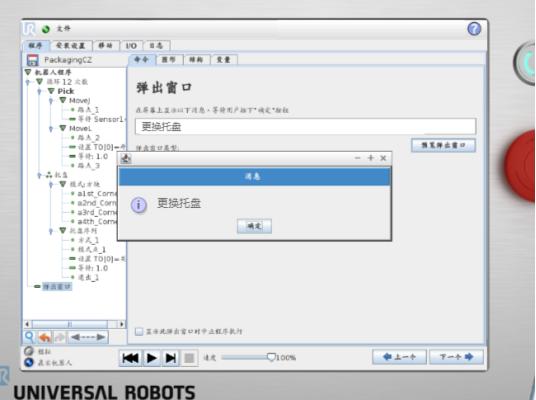
16.创建弹出窗口,提示操作员替换托盘,单击程序树中循环12次命令,单击弹出窗口,弹出窗口命令插入到程序树中。单击命令,在预览弹出窗口中输入替换托盘。单击预览弹出窗口,单击确定。单击播放按钮。
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为UR机器人指定经销商,专注于可定制化服务与解决方案。在线客服和免费热线:15814107663(微信同步)
公司主要提供:优傲协作机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为UR机器人指定经销商,专注于可定制化服务与解决方案。在线客服和免费热线:15814107663(微信同步)
公司主要提供:优傲协作机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

