
Remote TCP & Toolpath 是 Polyscope 5.6 中用于URe系列机器人的 URCap。
本文介绍如何使用 UR3e机器人设置桌面演示,以此展示 URCap 启用的远程 TCP 工具路径移动。
示例适用于:e 系列软件版本:5.6.0.90886
请注意,较旧或较新的软件版本可能表现不同。此示例仅可用于 URe 系列。
请为本次演示准备以下物品
1、UR3e 机器人牢固地安装在桌子上。
2、Fancort Industries 的点胶头(经过认证的 UR+ 合作伙伴)或任何其他可用作远程 TCP 的尖端工具。
3、可以连接到机器人工具法兰的尖头工具。
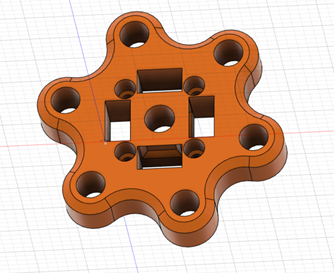
4、3D打印工件。
5、G代码工具路径文件。
6、程序和安装文件。
程序:RTCP_Toolpath_Demo.urp
安装:RTCP_Demo.installation
在继续之前,请了解如何执行以下操作。有关详细说明,请参阅 POLYSCOPE 用户手册中的导入程序和安装文件和设置 MoveJ 航路点。
设置程序
1. 3D打印工件副本。
2. 将UR3e机器人牢固地安装在桌面上。
a)升级到 Polyscope 5.6 或更高版本。请从此页面下载安装程序:https ://www.universal-robots.com/download/?option=41809#section41493
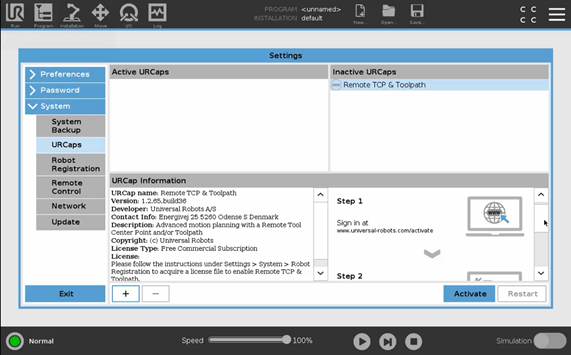
b)按照说明注册机器人以激活嵌入式远程 TCP 和工具路径 URCap。(菜单 -> 设置 -> 系统 -> URCaps)
步骤 1. 登录www.universal-robots.com/activate
步骤 2. 将注册文件下载到您的 USB 驱动器
步骤 3. 将 USB 驱动器插入示教器并点击激活以加载注册文件
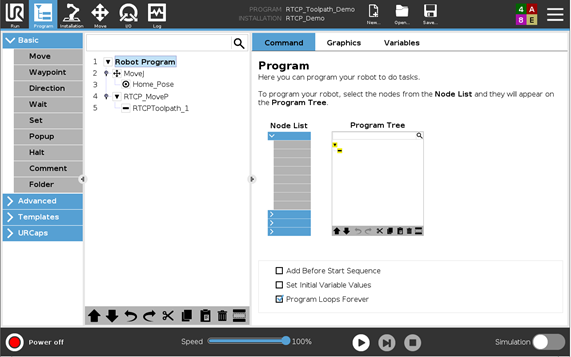
3. 将随附的程序和安装文件下载到您的 USB 驱动器并将它们导入 Polyscope。打开程序文件。
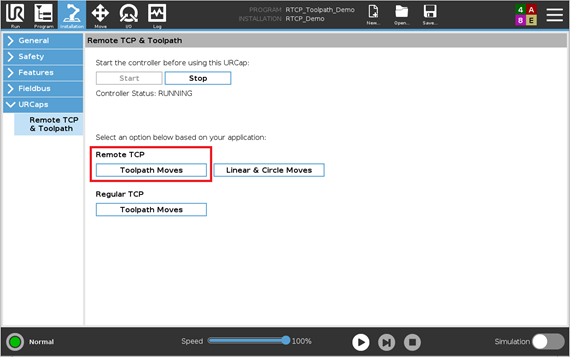
4. 在 Remote TCP & Toolpath URCap 中选择 Remote TCP Toolpath Moves 并通过嵌入式说明了解工作流程。
5. 将名为RTCP_Demo.nc的 G 代码工具路径文件下载到 USB 驱动器的根目录,并将其导入 Polyscope。

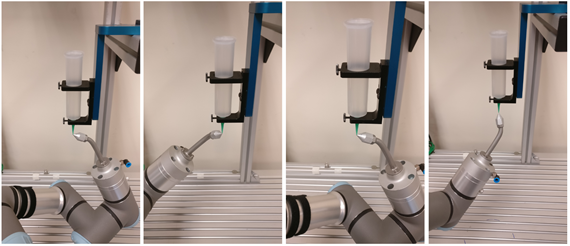
6. 将 Fancort 点胶头安装在机器人旁边。
确保点胶头指向机器人底座中的负 Z 方向,并且在机器人可触及的范围内。
在此示例中,分配头安装在水平铝挤压件上。
7. 将锋利的工具安装到机器人工具法兰上。
不必将其配置为 TCP。
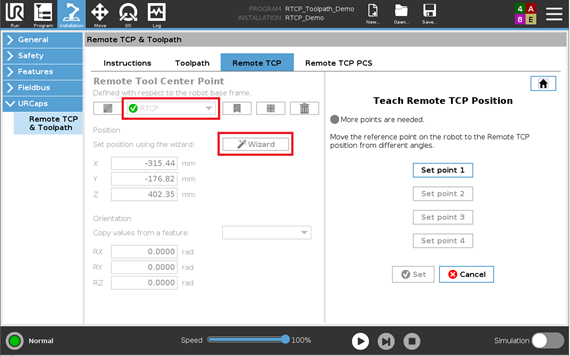
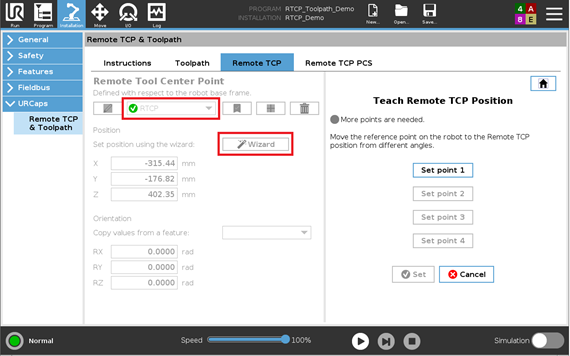
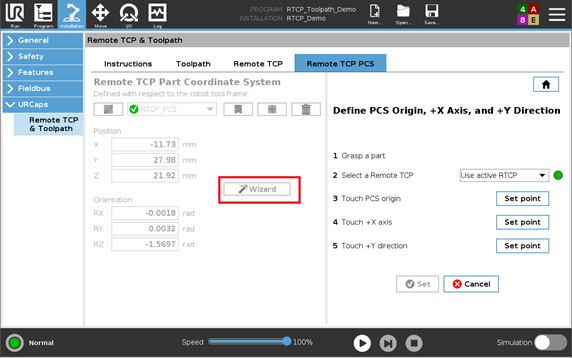
8.使用向导重新配置名为RTCP的远程 TCP 。
9. 将工件安装到机器人工具法兰上。
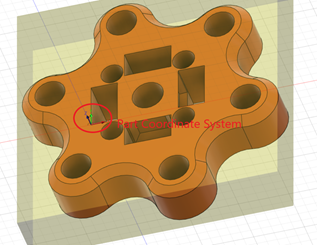
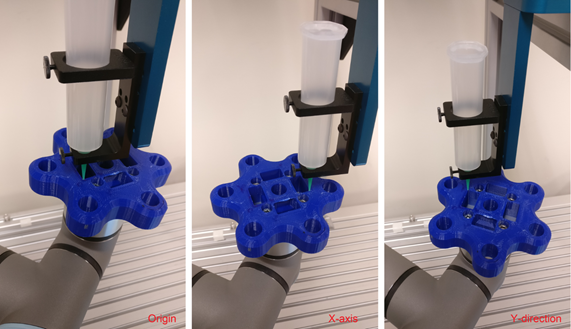
10.根据下图重新配置RTCP_PCS 。
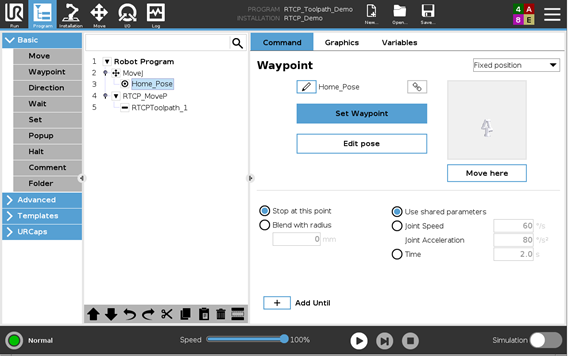
11. 进入程序。将Home_Pose设置为稍微远离点胶头。
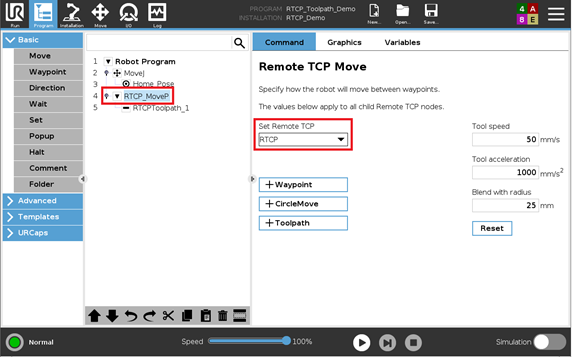
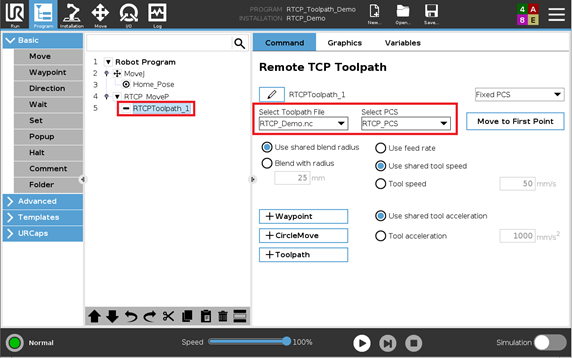
12. 确保选择了正确的 Remote TCP、PCS 和 Toolpath 文件。
13. 以低速运行程序以验证预期的运动。
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为UR机器人指定经销商,专注于可定制化服务与解决方案。在线客服/免费热线:15814107663(微信同步)
公司主要提供:优傲协作式机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|新能源|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为UR机器人指定经销商,专注于可定制化服务与解决方案。在线客服/免费热线:15814107663(微信同步)
公司主要提供:优傲协作式机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|新能源|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

