Case
3.1 台达机械手操作软件DROE"Customer Services"使用说明
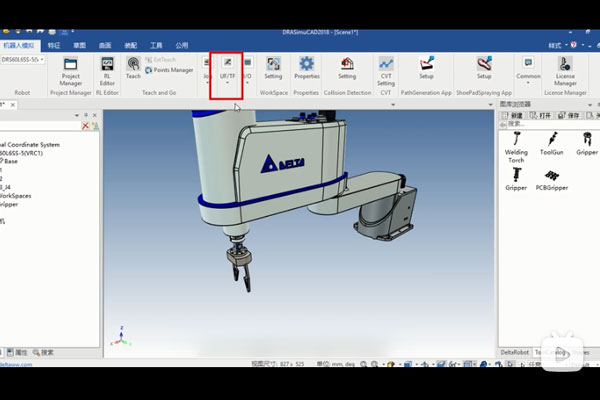
3.3 DRASimuCAD软件之路径生成应用说明
3.4 DRASimuCAD软件之手臂工作区禁止区設定
4.1 台达机械手运行指令点位Offset设定语法详解
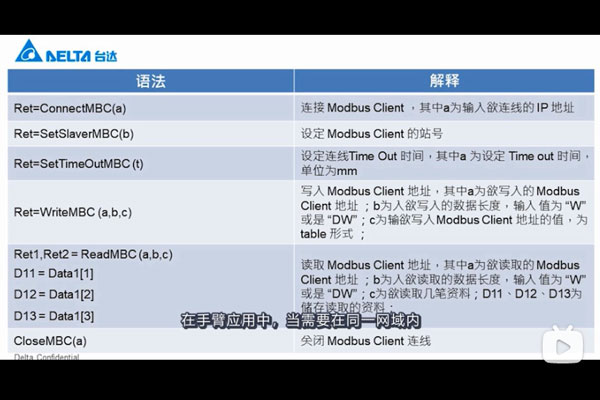
4.3 台达机械手"Modbus client"功能函数详解
4.4 台达机械手运行指令Pass功能详解
4.5 DRS系列机械手工具坐标系的建立和验证
4.6 DRS系列机械手使用者坐标系的建立和验证
4.7 台达机械手Payload设定详解
Online Message