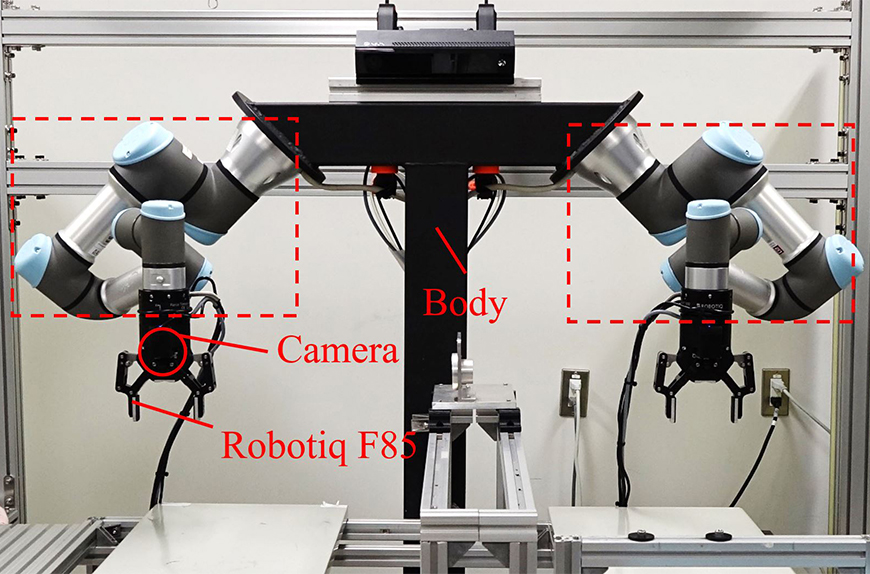
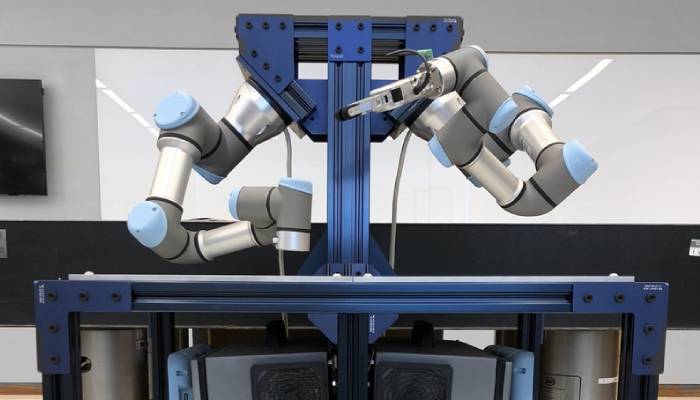
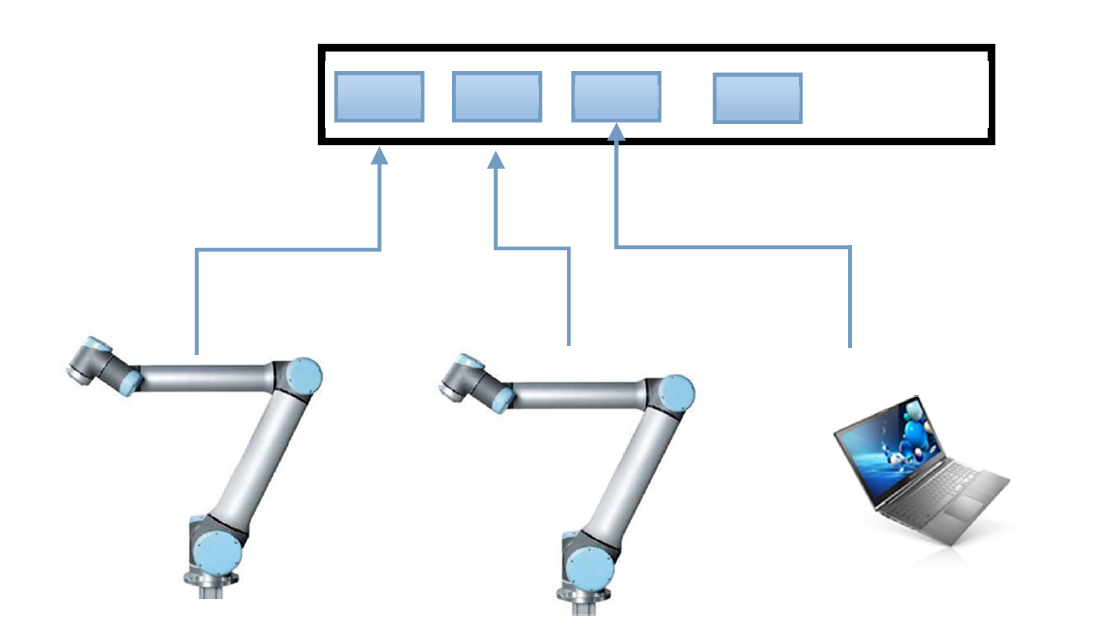
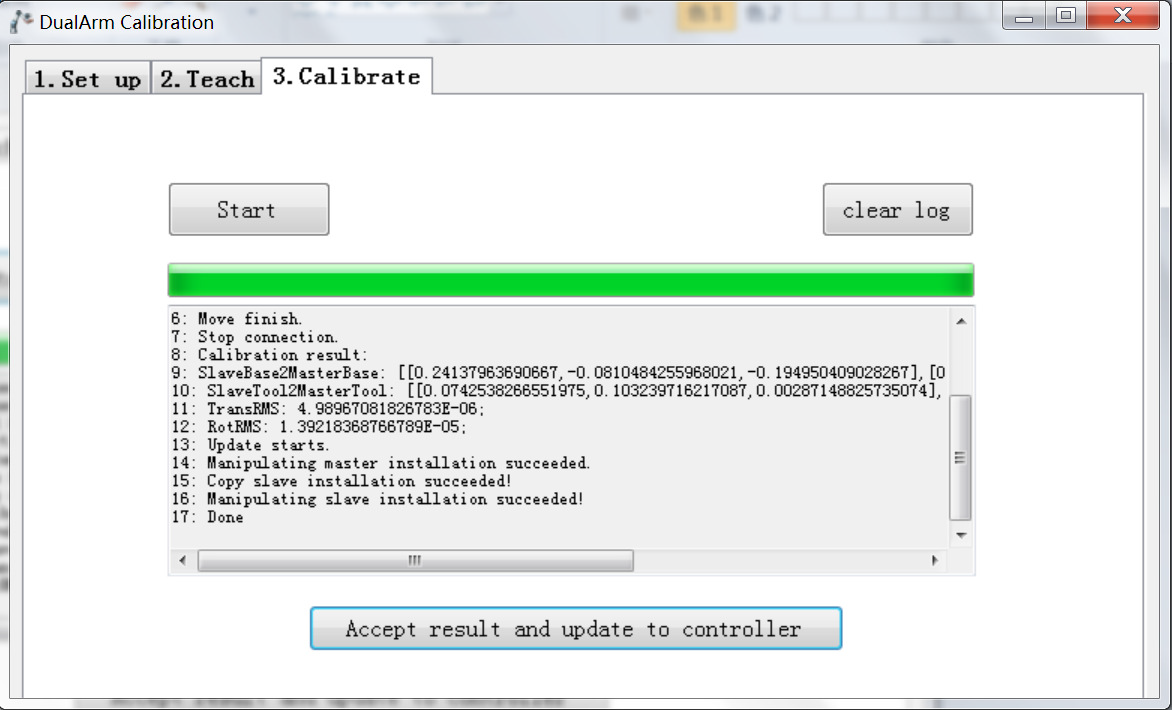
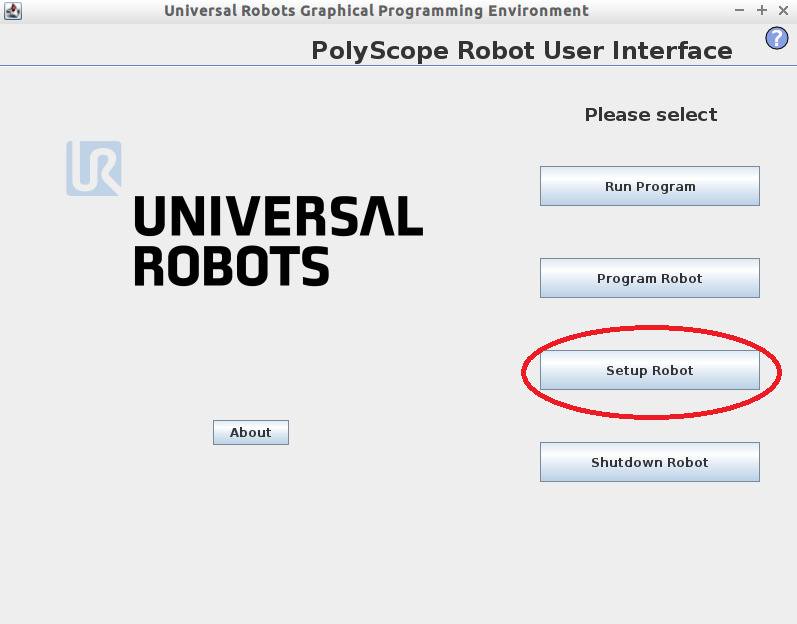
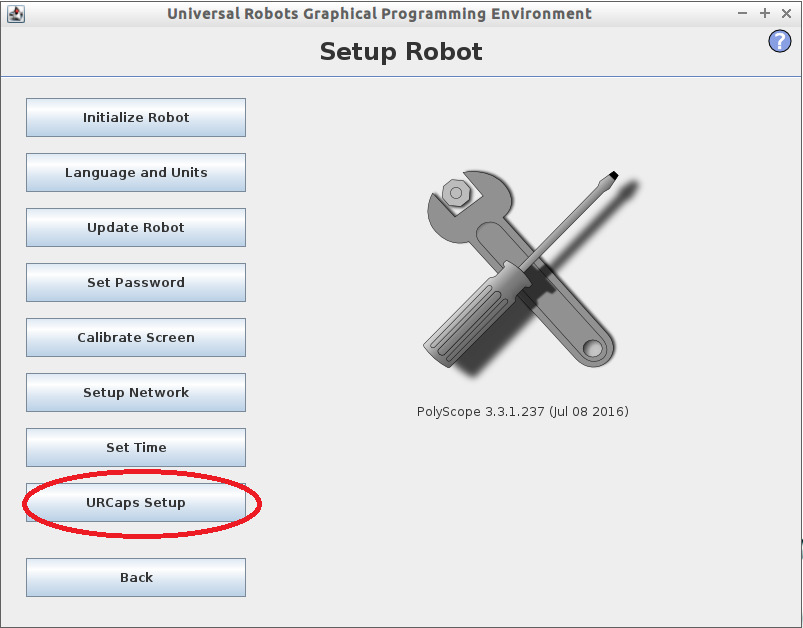
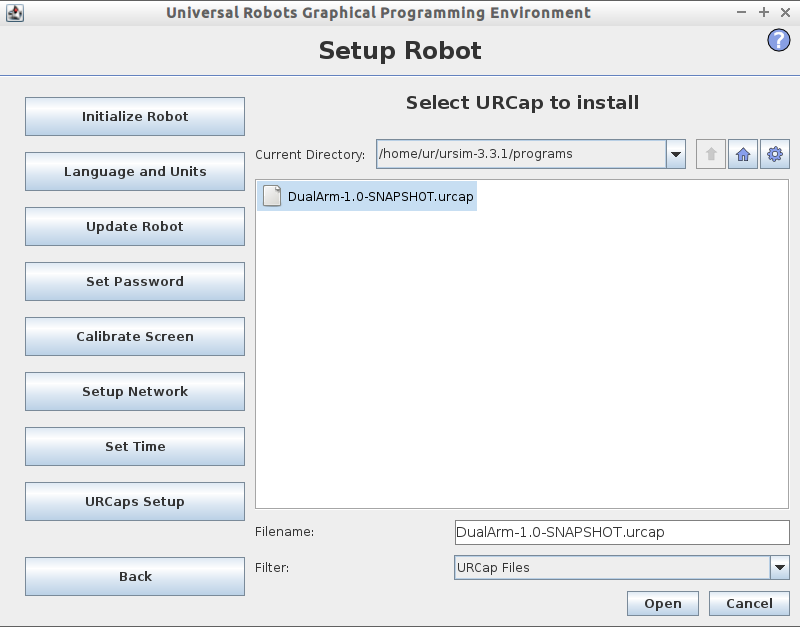
UR双臂机器人的两个手臂,既可以单独运行,也可以协同工作。从技术特点来说,优傲双臂机器人是由UR3/UR3e、UR5/UR5e、UR10/UR10e、UR16e任意两款或者同一款的两台机械臂组成,用户可以根据实际生产需要选择不同的机械臂进行搭配。同时,双臂协作应用支持任意角度安装,可以满足不同空间和负载的需求,具有非常高的灵活性;结合URCap 双臂插件和标定软件即可实现双臂共享坐标系,协同操作。一个工作站让用户有了多种选择,提高了设备利用率,可以最大程度实现柔性生产。
获取更多信息:15814107663 立即咨询>>
立即咨询>>
| 序号 | 品牌 | 型号 | 数量 | 备注 |
| 1 | 优傲机器人 | UR5机器人 | 2 | 机器人系统版本号要求Version 3.2.x.x及后续版本 |
| 2 | 工业级交换机或者路由器 | 至少3个网口 | 1 | IP防护等级根据具体的应用需求定 |
| 3 | Cat7类屏蔽网线 | 3 | ||
| 4 | 24V信号线 | 5 | ||
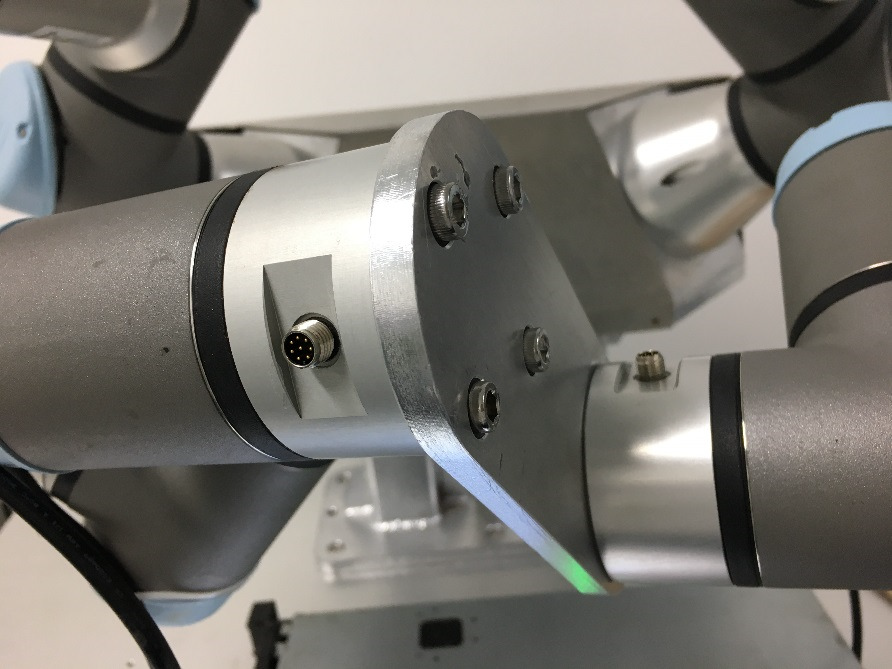
| 5 | 法兰链接件 | 机加工 | 1 | 固定两台机器人的法兰(标定用),无需标定则不需要 |
 |
 |
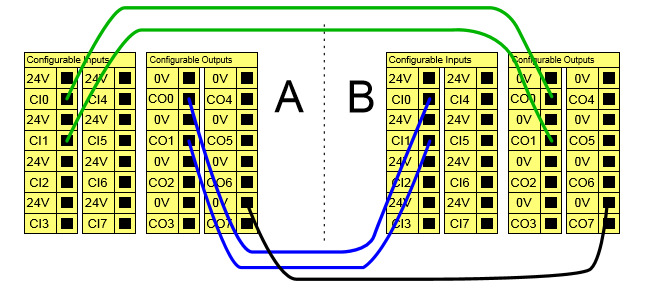
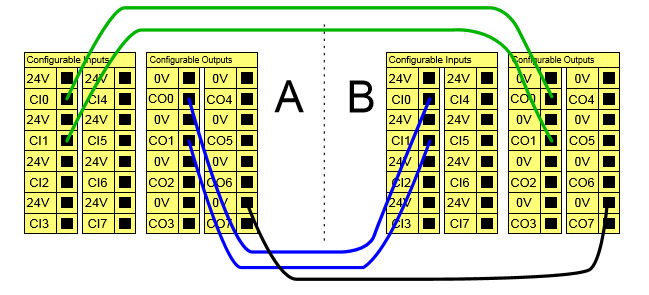
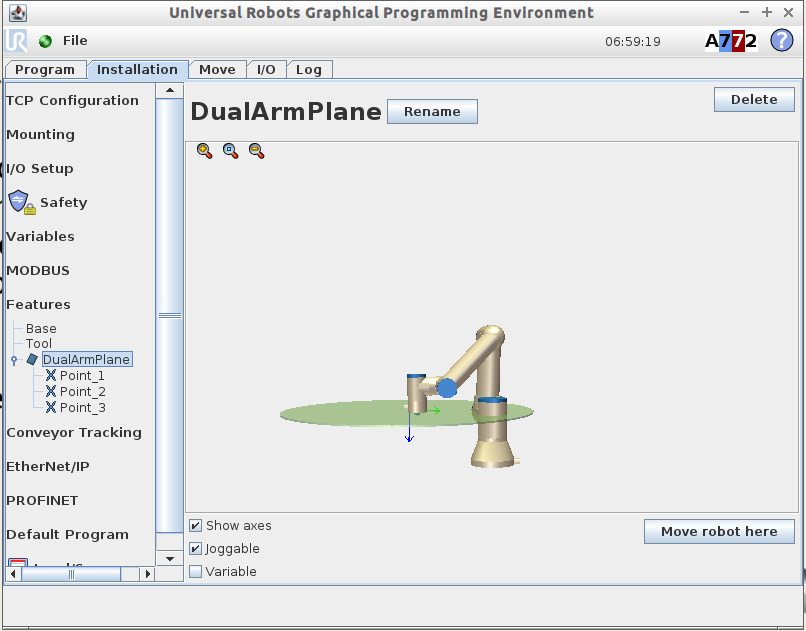
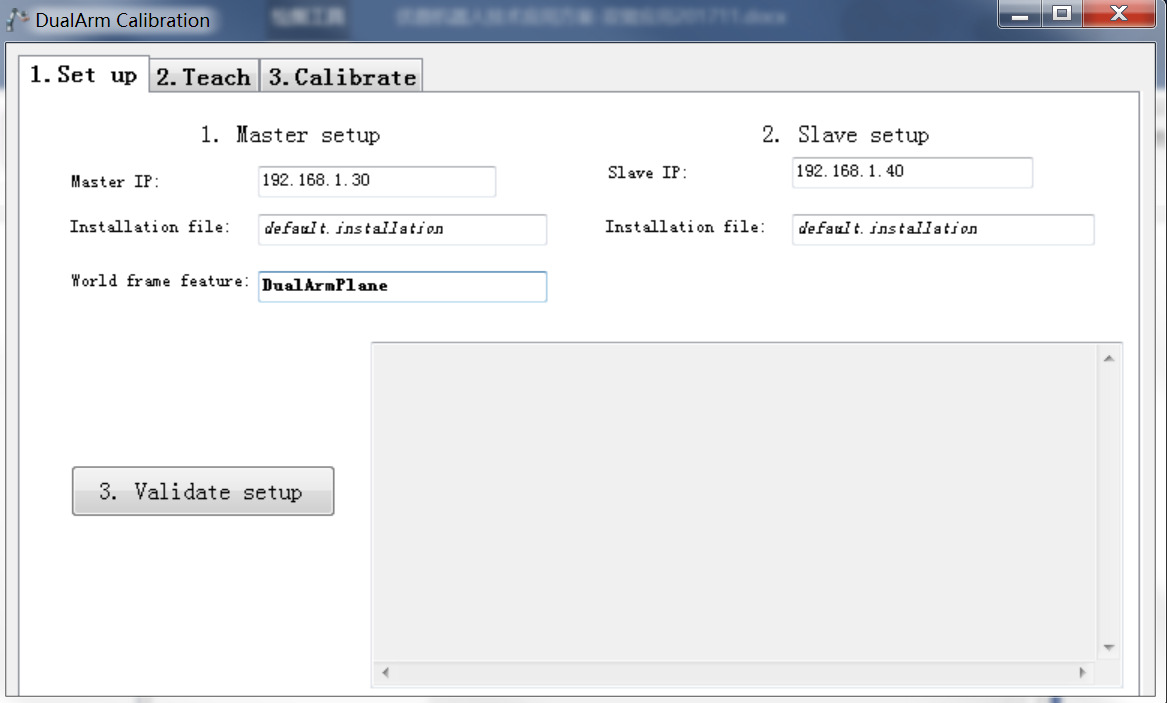
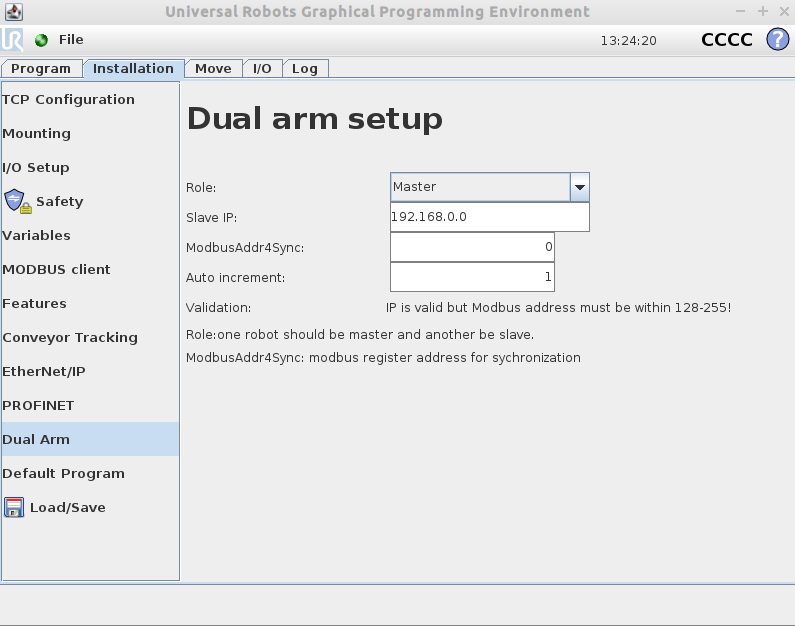
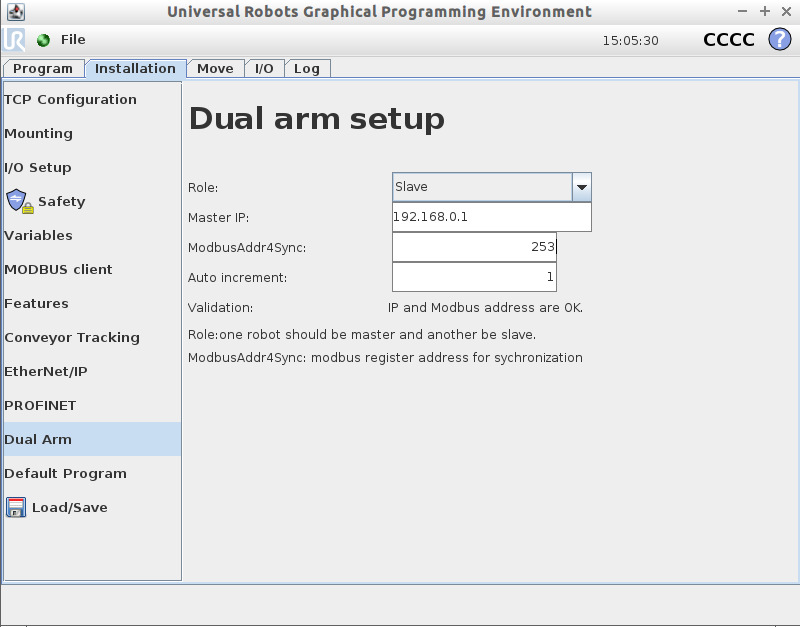
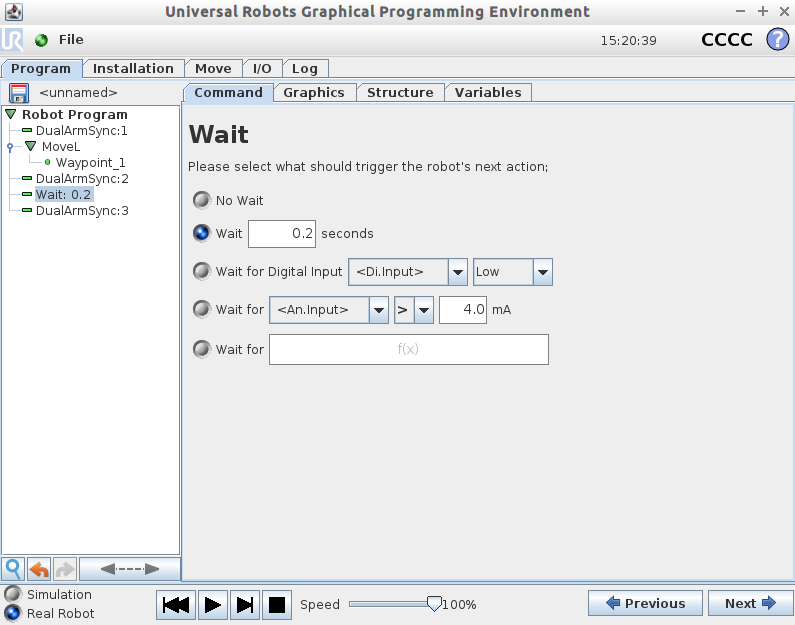
| (1) | (2) |
 |
 |
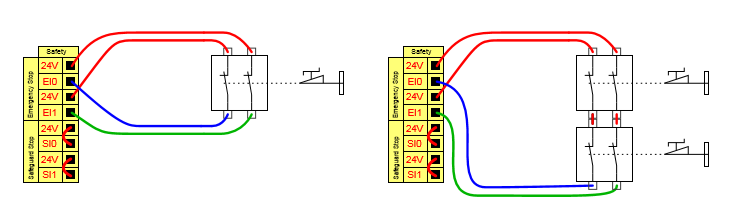
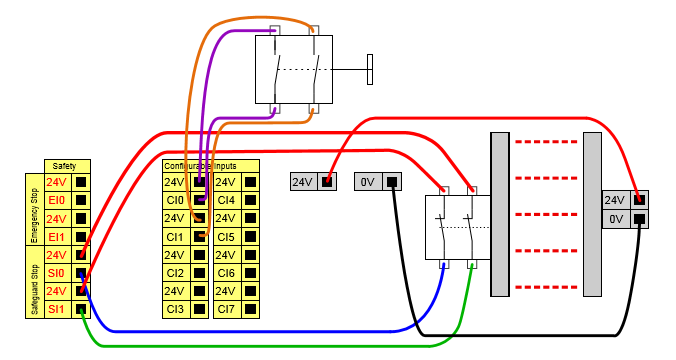
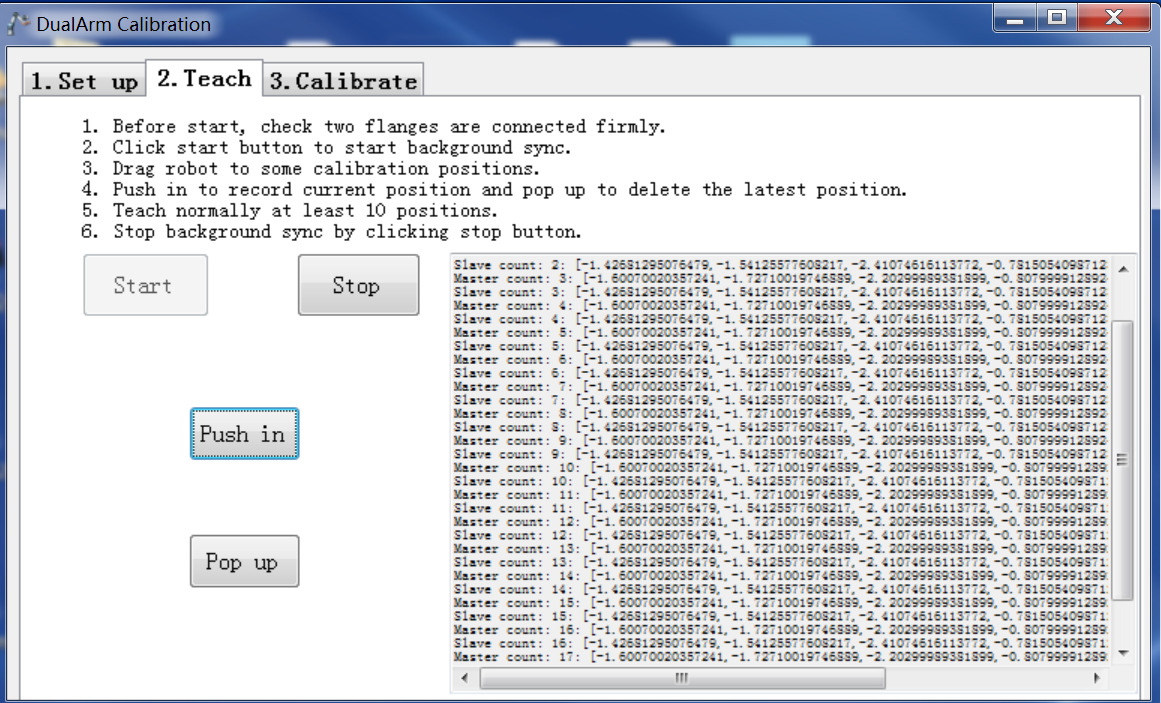
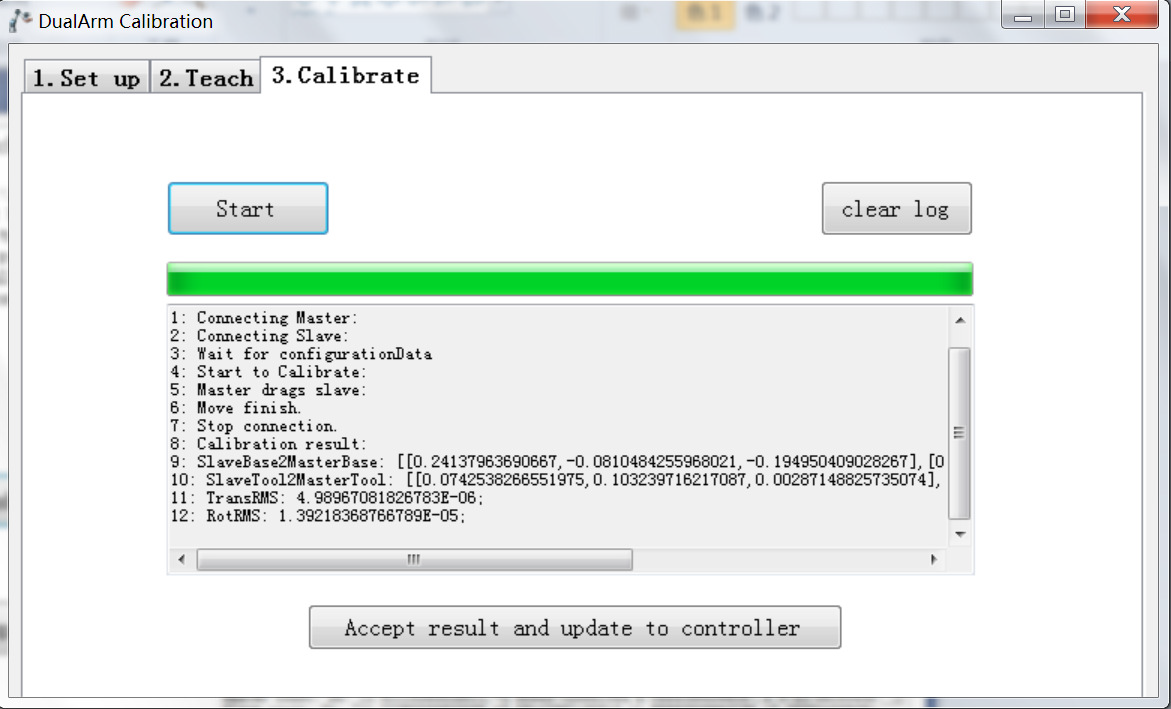
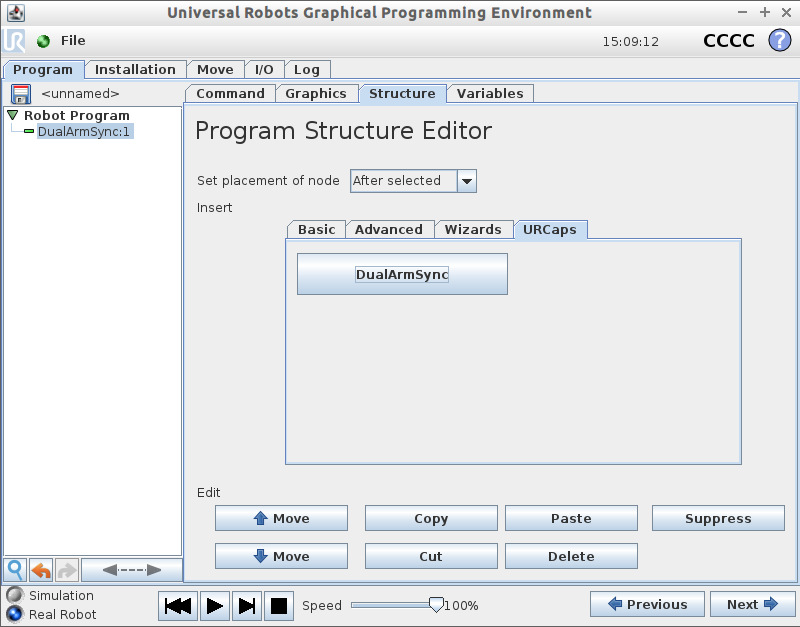
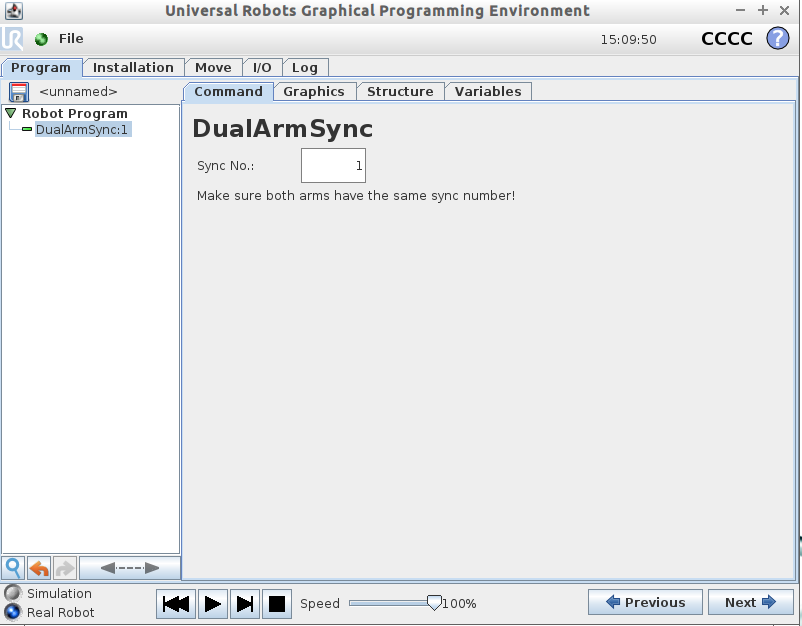
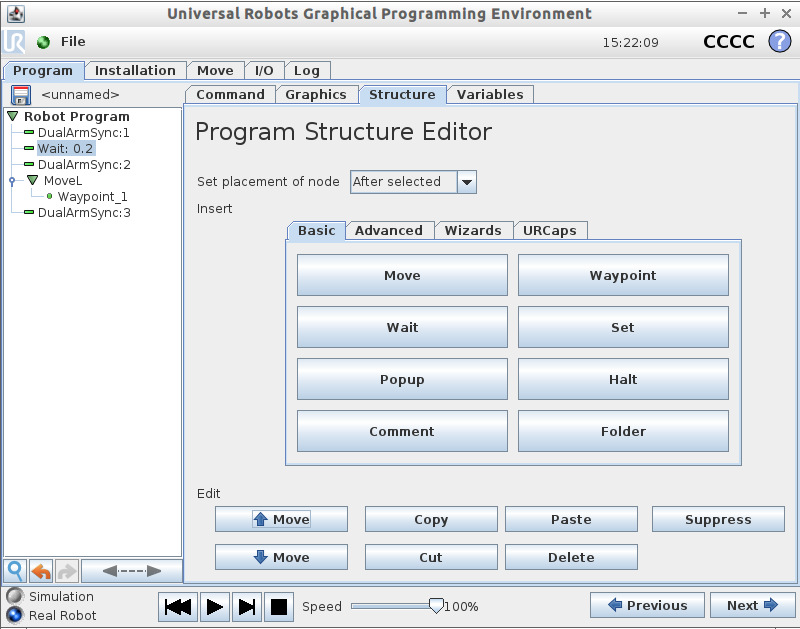
| (3) | (4) |

copyright (©) 2021 东莞市库崎智能科技有限公司 粤ICP备:17066985号 技术支持:麦田网络